Firmware Update
This section provides instructions on how to update the firmware. We support many ways, such as via SEGGER J-Link, OpenOCD or Serial-COM.
Note
Stay connected during the update process and use the correct Device and Interface.
The LEAPS UWBS also support firmware update over the BLE, refer Firmware Update over BLE for more detail information.
For more detailed information, select the method you want to use below:
Prepare for setup
At least a device.
A binary file to update. (.hex or .bin)
Installed SEGGER J-Link.
Step-by-step instructions on how to update via SEGGER J-Link
Install the SEGGER J-Link.
Locate the Windows download file named
JLink_Windows_V766_x86_64.exe.
Double-click the file to initiate the installation process.
When prompted, enter the administrative password.
Please read and agree to the license terms by accepting them.
Accept the default destination folder for the installation, typically located at
C:\Program Files (x86)\SEGGER\JLink.Proceed with accepting the default USB driver.
Upon completion of the installation, you will find a folder and a set of driver files installed in the system folders. Please note that with each new installation, these files will be overwritten.
Locate the macOS download file named
JLink_macOSX_V766_x86_64.pkg.
Double-click the file to initiate the installation process.
Please read and agree to the license terms by accepting them.
Enter the administrative password when prompted. This password is required to write in the Applications folder.
After the installation, you will find a folder in the following location:
/Applications/SEGGER/JLink_V766/. Please remember that each version will have a different folder. This folder will store all the executables and libraries associated with the application.Visit the SEGGER download site for GNU/Linux and locate the desired package. Choose between 32/64-bit versions.
Preferably, download the .tgz file and save it to your computer.
Open a terminal window.
For example, on Ubuntu (Linux), to install the 64-bit .tgz file, use the following commands:
mkdir -p ~/opt/SEGGER cd ~/opt/SEGGER tar xf ~/Downloads/JLink_Linux_V766_x86_64.tgz chmod a-w ~/opt/SEGGER/JLink_Linux_V766_x86_64 ls -l ~/opt/SEGGER/JLink_Linux_V766_x86_64After executing the above commands:
A folder will be created at ~/opt/SEGGER.
The contents of the downloaded .tgz file will be extracted to the ~/opt/SEGGER folder.
The permissions of the JLink_Linux_V766_x86_64 file will be modified.
Can verify the installation by checking the contents of the ~/opt/SEGGER/JLink_Linux_V766_x86_64 folder.
Please note that the installation will overwrite any existing files in the system folders during each new install.
Open the SEGGER J-Link then flash the binary file.
Make sure that the latest J-Link software & documentation pack is installed.
Connect J-Link to the PC
Connect target system to J-Link
Start J-Flash Lite
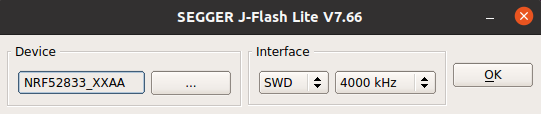
Select device, debug interface and communication speed
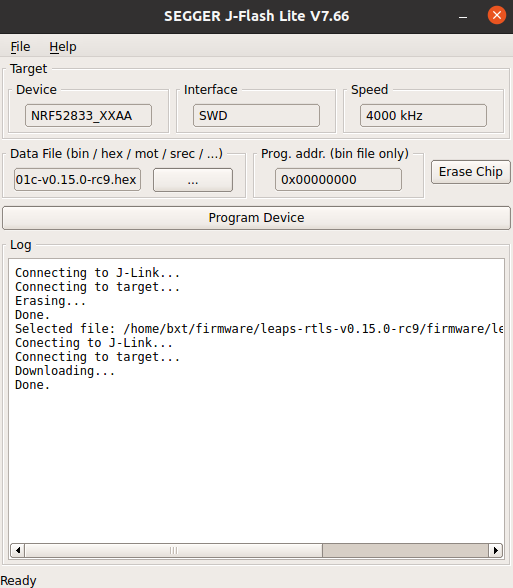
Choose a file and click Program Device or click Erase Chip
J-Flash Lite performs the requested operation
Make sure that the latest J-Link software & documentation pack is installed.
Connect J-Link to the PC.
Connect target system to J-Link
Start J-Link Commander.
Type the following commands:
J-Link> device <devicename> // For a list of known devices, please refer to here
J-Link> r
J-Link> h
J-Link> loadbin <PathToBinFile>, <programmingaddress>
J-Link Commander executes the flash download and prints out the time statistics upon success.
Once the update is complete, the board will automatically reset itself as part of the process.
Prepare for setup
At least one device.
A package includes a script and a binary for the update.
Installed OpenOCD.
Step-by-step instructions on how to update via OpenOCD (Open On-Chip Debugger)
Install the OpenOCD Debugger
Download the xPack OpenOCD package for Windows.
Extract into the
C:\xpack-openocd-0.11.0-1folder.Add the path:
C:\xpack-openocd-0.11.0-1\binto your Windows User Path environment variable.
Download the xPack OpenOCD package for macOS.
Untar the tarball and install into local.
For example, to install the xpack-openocd-0.11.0-1-linux-arm.tar.gz file, use the following commands:
mkdir -p ~/.local/xPacks/openocd cd ~/.local/xPacks/openocd tar -zxvf ~/Downloads/xpack-openocd-0.11.0-1-linux-arm.tar.gz (with PC’s AMD core, using … linux-x64.tar.gz with PC’s Intel core) .... sudo chmod -R -w xpack-openocd-0.11.0-1/ ~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/openocd --version export PATH="~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/:$PATH" cd ~ source .bashrc
Download the xPack OpenOCD package for GNU/Linux.
Untar the tarball and install into local.
For example, on Ubuntu (Linux), to install the xpack-openocd-0.11.0-1-linux-arm.tar.gz file, use the following commands:
mkdir -p ~/.local/xPacks/openocd cd ~/.local/xPacks/openocd tar -zxvf ~/Downloads/xpack-openocd-0.11.0-1-linux-arm.tar.gz (with PC’s AMD core, using … linux-x64.tar.gz with PC’s Intel core) .... sudo chmod -R -w xpack-openocd-0.11.0-1/ ~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/openocd --version export PATH="~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/:$PATH" cd ~ source .bashrc
Check the OpenOCD version
openocd --version xPack OpenOCD, x86_64 Open On-Chip Debugger 0.11.0-00155-ge392e485e (2021-03-15-16:43) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html
Download and Extract the package to your PC.
Example with the UDK board: Use a program like WinZip or 7-Zip to extract the downloaded to be defined file.
Open your favorite terminal application.
On linux or macOS, like Terminal application.
On Windows, like Powershell application.
Navigate to the folder containing the extracted package.
cd to /path/to/LEAPS-UWBS-Firmware-OpenOCD
Use the cable to connect the device to your PC.
Example with the UDK board: Use a USB-C Data Cable to connect the USB-C Data Port 2 of devices to your PC.
Execute the script to update the firmware automatically.
On Windows, Use the udk-leaps-uwbs-firmware.bat command.
On macOS, Use the udk-leaps-uwbs-firmware.sh command.
On GNU/Linux, Use the udk-leaps-uwbs-firmware.sh command.
For example, on Ubuntu (Linux):
./udk-leaps-uwbs-firmware.sh xPack OpenOCD, x86_64 Open On-Chip Debugger 0.11.0-00155-ge392e485e (2021-03-15-16:43) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html DEPRECATED! use 'adapter speed' not 'adapter_khz' set_test_mode Info : Using CMSIS-DAPv2 interface with VID:PID=0x0d28:0x0204, serial=01100E003602002e003f4146570120313238 Info : CMSIS-DAP: SWD Supported Info : CMSIS-DAP: FW Version = 2.1.0 Info : CMSIS-DAP: Serial# = 01100E003602002e003f4146570120313238 Info : CMSIS-DAP: Interface Initialised (SWD) Info : SWCLK/TCK = 1 SWDIO/TMS = 1 TDI = 0 TDO = 0 nTRST = 0 nRESET = 1 Info : CMSIS-DAP: Interface ready Info : high-speed (adapter speed 10000) may be limited by adapter firmware. Info : clock speed 10000 kHz Info : SWD DPIDR 0x2ba01477 Info : nrf52.cpu: hardware has 6 breakpoints, 4 watchpoints Info : starting gdb server for nrf52.cpu on 3333 Info : Listening on port 3333 for gdb connections target halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0x000031ec msp: 0x20003488 target halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0xfffffffe msp: 0xfffffffc Info : nRF52840-CKAA(build code: D0) 1024kB Flash, 256kB RAM auto erase enabled wrote 1048576 bytes from file leaps-rtls-all-2ab-v0.14-rc25.hex in 38.776192s (26.408 KiB/s)
Once the update is complete, the board will automatically reset itself as part of the process.
Install LEAPS-COM tool
Follow instructions in section describing how to install LEAPS-COM.
You will need
At least one device connected via the USB port or the serial port, alternatively, the device advertises on the BLE interface if enabled.
The firmware binary included in the package.
The python3 installed on you system.
Connect USB data cable to the USB port. Execute following command to update Firmware and Extended-Loader on the available devices that are connected on the USB interface.
$ python3 -m leapscom --usb --main main.bin --eldr eldr.bin
In order to update only certain devices you need to specify serial number.
$ python3 -m leapscom --usb 630D46F2D51482FC 7E1C5859C2ECF343 --main main.bin --eldr eldr.bin
Before update, make sure that BLE is enabled on the devices (see section Discovering devices for more details). Execute following command to update Firmware and Extended-Loader of all the devices that are advertising on the BLE interface.
$ python3 -m leapscom --ble --main main.bin --eldr eldr.bin
In order to update only certain devices you need to specify the BLE address.
$ python3 -m leapscom --ble FE:40:B4:BC:D3:42 E0:05:86:49:A9:40 --main main.bin --eldr eldr.bin
Connect USB data cable to the Serial port. Execute following command to update Firmware and Extended-Loader over the serial ports.
$ python3 -m leapscom --dev /dev/ttyACM0 /dev/ttyACM1 /dev/ttyACM2 --main main.bin --eldr eldr.bin
Verify the firmware and confirm success
Open your favorite terminal application,
On GNU/Linux or macOS, like Terminal application.
On Windows, like Powershell application.
For example, on Ubuntu (Linux), open minicom and press double enter:
minicom -b 115200 -D /dev/ttyACM0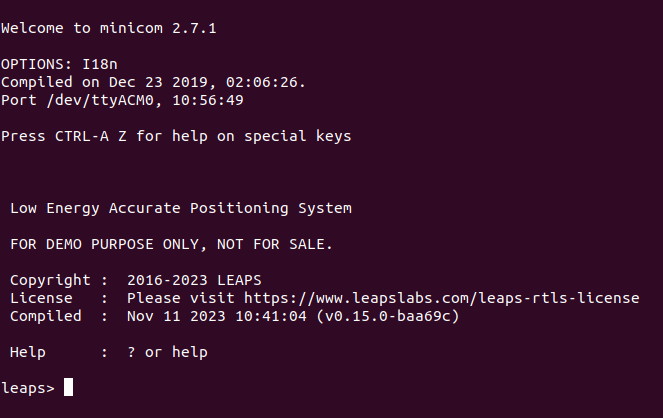
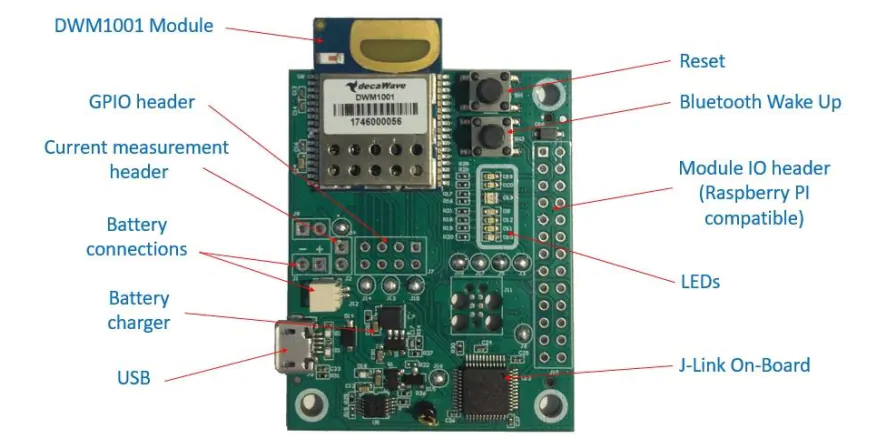
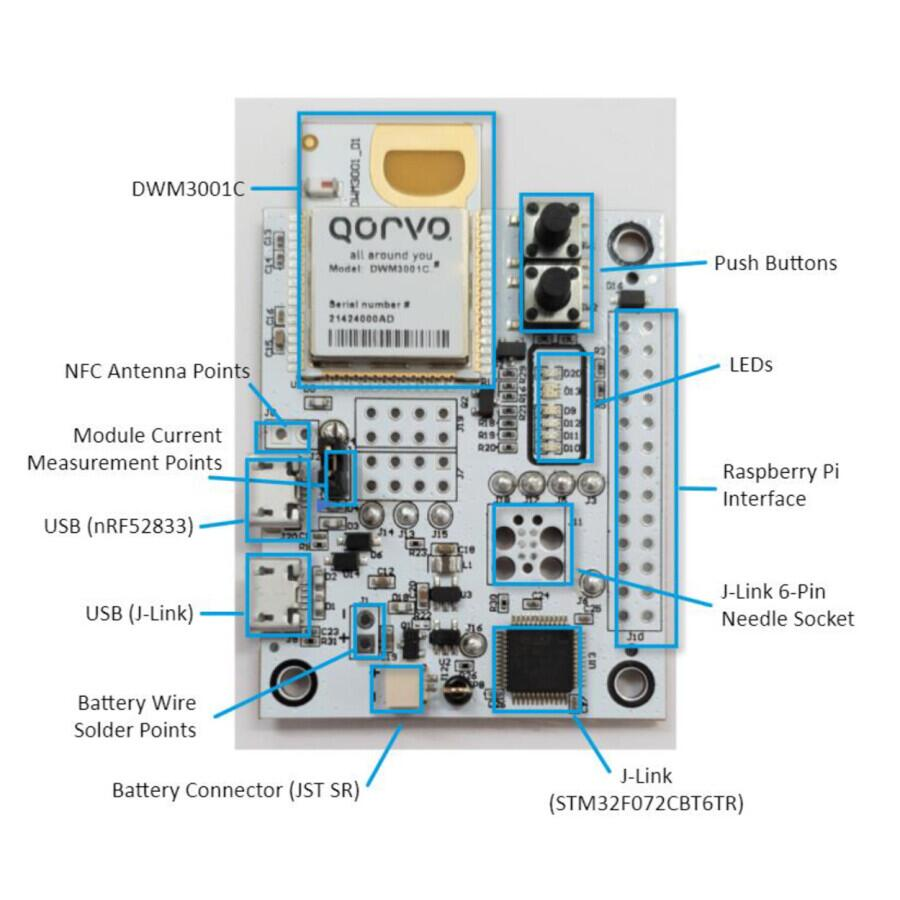
For the connection, let’s first take a look at an overview of the main components of DWM1001-DEV and DWM3001CDK development kit.
Note
For the UDK Kit, please refer to the detailed information in the Hardware Interfaces section.