通用
我是实时定位系统的新手. 你有基本术语的列表吗?
锚点 - AN (锚节点) - 具有固定位置的基础设施节点 - 能够测量位置数据, 数据卸载和路由的参考节点.
锚节点可以启用网关功能 - 它可以作为 UWB 子系统与其他接口(如以太网和 WiFi)之间的网关. UWB 子系统通过 SPI 或 USB 接口与主机连接.
定位引擎 (LE) - 一种使用测量值进行位置估计的算法. 主要分为两组
三维定位 - 利用节点之间的距离来估计位置的定位引擎,尤其是在使用三维定位时.
多方位 - 利用节点之间的时差来估计位置的定位引擎,尤其是在使用 TDoA 时.
导航 - 在移动对象一侧收集和使用位置数据的定位模式. 在 LEAPS RTLS 和 PANS PRO RTLS 的导航模式中,位置是在模块上计算的,数据可通过模块上的应用程序接口获取. 这种方法可在移动设备上提供极低延迟的定位数据,降低基础设施成本,并大大简化部署. 典型应用包括无人机, 机器人, 工具, 车辆和便携式设备的导航.
节点 - 能够与其它设备(锚点, 标签……)通信的网络设备.
标签 - TN(标签节点) - 移动位置的移动节点 - 它使用锚点来测量, 定位自己的位置,并根据不同的模式,以指定的更新率交换数据.
到达时间差 (TDoA) - 这是一种测量技术,在已知的固定位置测量节点之间的时间差. 测量结果就是时差. 已知固定位置的节点通常需要同步. TDoA 是一种双曲线定位方法,有两个主要子类别
上行链路 TDoA(UL-TDoA) - 是 TDoA 的一种**跟踪**模式,标签通常会在随机时间发送一条名为闪烁的短信息. 锚点接收到闪烁信息后,利用同步时间,采用双曲线定位法估算标签的位置. 这种定位方法至少需要 4 次测量,通常对锚点部署的形状更为敏感. 由于标签只需短暂闪烁,因此这种方法耗电量最低. UL-TDoA 标签对硬件设计和电池的要求也较低. 与需要更复杂的时间调度和避免碰撞方案的 TWR 系统相比,这种方法更容易实现网络可扩展性和标签低功耗,因为它可以随机访问媒体.
下行链路TDoA(DL-TDoA) - 是TDoA的**导航**模式,标签只聆听来自锚点的包含时间和通常锚点位置的网络信息. 根据这些数据,标签可以计算出自己的位置. 这类似于室内使用的全球导航卫星系统(GNSS). 由于标签只监听不发送,因此对标签的数量没有限制. 这种模式允许标签完全保密,因为它们不会发射信号.
跟踪 - 在中央服务器上收集位置和遥测数据的一种定位模式. 数据可通过 LEAPS 服务器 API 获取. 这种模式适用于在一个地方(通常在服务器上)监控和处理大量设备的数据. 典型应用包括资产追踪, 区域违规检测, 运动员成绩监控和人员追踪等.
双向测距(TWR) - 是一组测量技术,通过双向交换信息来估计两个节点之间的距离. 测量结果就是距离. 标签位置计算不需要节点的时间同步.
超宽带(UWB) - 是一种无线电技术,可以使用非常低的能量水平,在大部分无线电频谱上进行短距离, 高带宽通信. 与蓝牙, WIFI 或 GPS 等其他技术相比,UWB 对多径衰落具有很强的免疫力. 因此,它适用于精确定位,尤其是在室内.
DWM1001, PANS RTLS, PANS PRO RTLS 和 LEAPS RTLS 之间有什么区别?
DWM1001 是基于 Decawave/Qorvo 的 DW1000 超宽带 (UWB) 收发器 IC 的硬件模块,它是 IEEE 802.15.4-2011 UWB 实现. 它集成了 UWB 和 Bluetooth® 天线, 所有射频电路, Nordic Semiconductor nRF52832 和运动传感器. 该模块最初由 LEAPS 设计,并以 Decawave 品牌销售.
PANS RTLS 是一个完整的实时定位系统和网络堆栈,以TWR测量技术为基础. UWB 子系统可配置为锚点, 标签或网关模式. 软件堆栈由 LEAPS 开发,以 Decawave/Qorvo 品牌销售.
PANS PRO RTLS 基于 PANS RTLS 协议栈. 它由 LEAPS 维护并提供给市场. PANS PRO RTLS 中对许多软件进行了改进和错误修正,以提供可用于生产的堆栈. 一系列经过认证的产品已通过此软件栈推向市场. 与 PANS RTLS 协议栈一样,该协议栈以二进制代码的形式免费提供给市场.
LEAPS RTLS 是一个先进的实时定位系统,可涵盖广泛的导航和追踪使用案例. 其核心是一个嵌入式 UWB 子系统,可配置为不同的模式和配置文件. 该协议栈可在锚点, 标签或网关模式下运行. 网络配置文件完全可扩展,具有高容量和低功耗的特点. 其多功能性使系统要求, 成本, 部署时间和维护复杂性之间的平衡变得容易. 应用范围从简单的距离接近,到高速跟踪或导航无限量的接收器. 支持的测量技术包括 TWR(双向测距), UL-TDoA(使用上行链路到达时间差进行跟踪)和 DL-TDoA(使用下行链路到达时间差进行导航). LEAPS 协议栈已整合到 LEAPS 以及第三方的产品中.
LEAPS如何参与DWM1001模块和PANS RTLS网络堆栈的开发?
DWM1001模块 最初是由LEAPS设计的,LEAPS参与了设计, 模块调试, 验证,并以Decawave/Qorvo的品牌将设计投入生产.
LEAPS 设计并开发了PANS RTLS 的 软件堆栈,包括一套广泛的嵌入式测试,用于生产中的模块校准和功能测试.
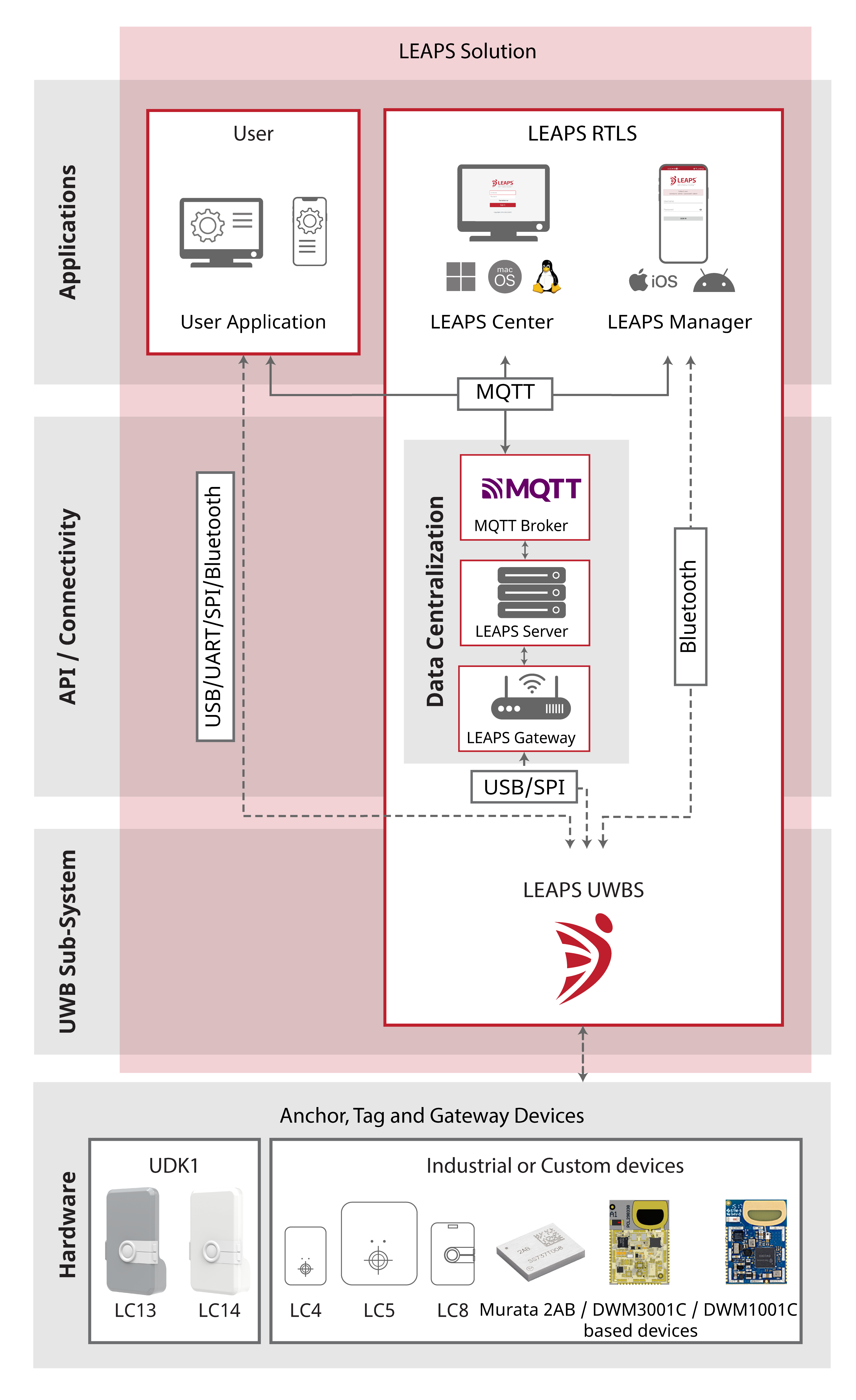
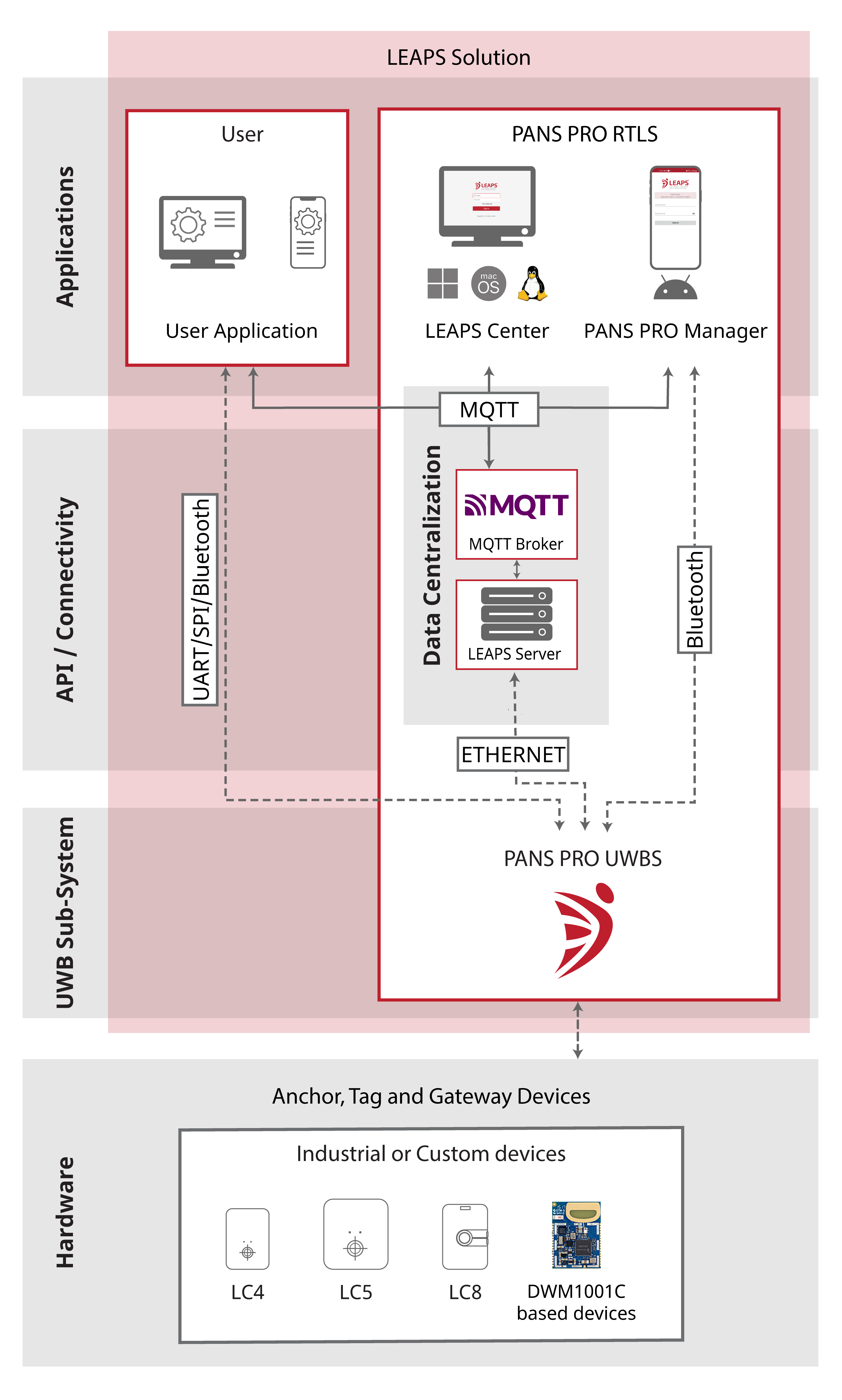
LEAPS RTLS 与 PANS PRO RTLS 在架构上有何不同?
LEAPS RTLS(上)和 PANS PRO RTLS(下)的系统架构比较:
LEAPS RTLS 系统架构
PANS PRO RTLS 系统架构
如何实现两个设备之间尽可能长的距离?
这与 菲涅尔区 有一定关系. 很久以前,我们曾在大约 1.2 米至 1.5 米的高度进行过一些测量,结果发现信号在一定距离内丢失,然后在 5 至 10 米处恢复一段时间. 后来,我们发现了菲涅尔区域,并将高度增加到 2 米,从那以后,我们就再也没有观察到这个问题了.
对于大多数无线电讯号,你只需要注意第一菲涅尔区,但对于超宽带无线电讯号,似乎其他区域也很重要.
实际例子:
天线间距 = 100米
频率 = 6.5GHz
第一区域半径 = 1.07米
第2区半径 = 1.52米
第三区半径 = 1.86米
天线间距 = 200 米
频率 = 6.5GHz
第一区半径 = 1.52 米
第2区半径 = 2.15米
第3区半径 = 2.63米
在线计算器在这里 菲涅尔区计算器