ダウンリンク TDoA RTLS デモ
セットアップの準備
LEAPSマネージャー アプリケーションがインストールされました。
少なくとも 5 つの LC14 デバイス。
デバイスに電力を供給するためのバッテリーまたは USB-C ケーブル。
推奨: アンカー デバイスの取り付けにはカメラ マウントを備えたクランプまたは三脚を使用します。
オプション: Putty、Teraterm、minicom、またはコンピュータにインストールされているお気に入りのターミナル アプリケーション。
セットアップ時間: 5 分未満
概要
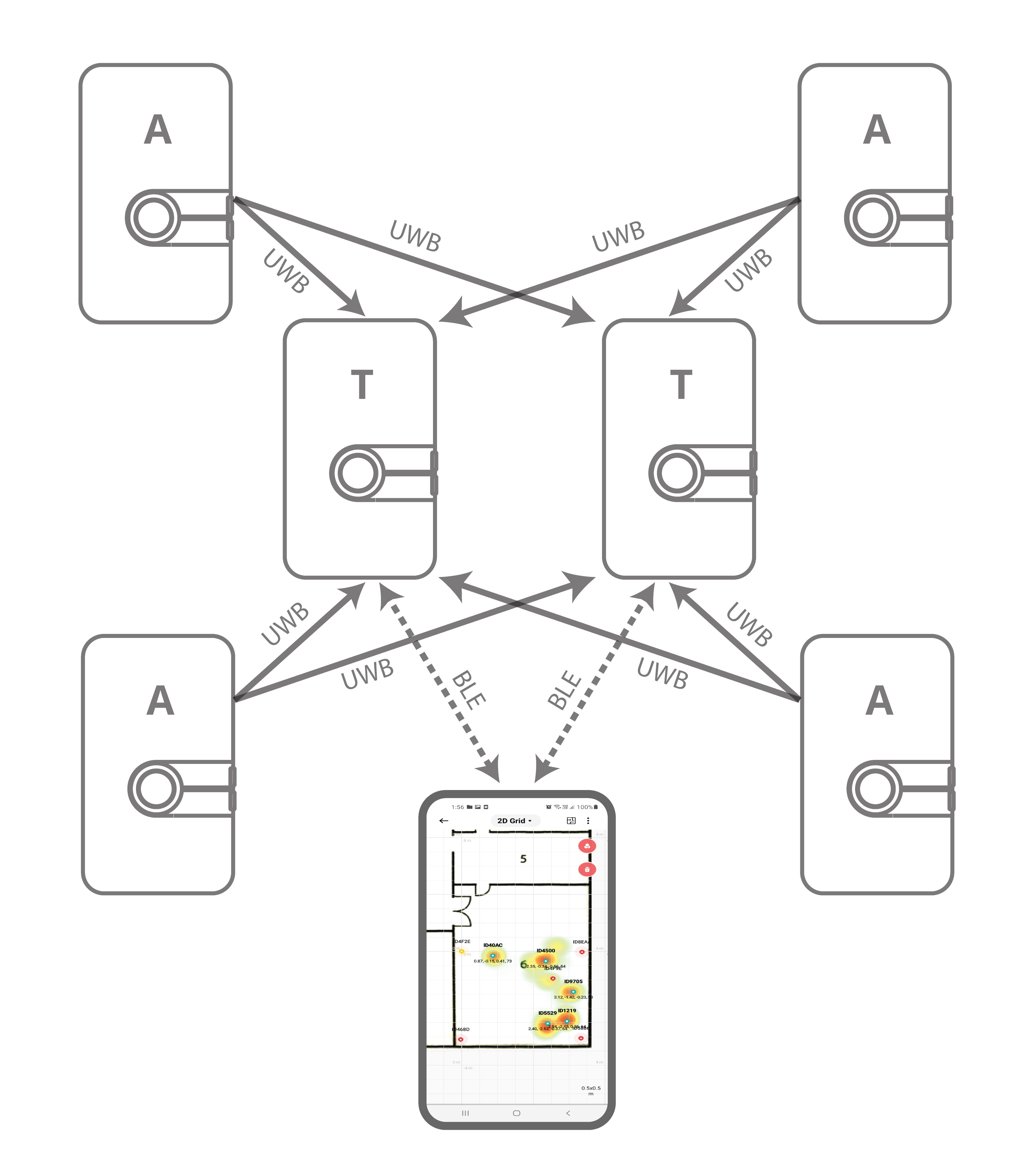
このセットアップは、ダウンリンク到着時間差 (DL-TDoA) テクノロジーを使用した、完全なプライバシーを備えた受信専用モードでの無制限の量のタグのリアルタイム ナビゲーションを示し、タグ位置ナビゲーションを備えた LEAPS Manager アプリケーションを示します。
代表的なアプリケーション: マッピングを使用した屋内ナビゲーション、自律ロボットおよび車両ナビゲーション、別の通信チャネルを通じて送信される位置データを使用した資産追跡。
セットアップ手順
デバイスの電源を ON にします。。
静的にマウントされたデバイスはアンカーとして機能し、位置情報をタグに提供します。
移動デバイスは、ナビゲーション モードで構成されたタグとして、受信モードのみで機能し、送信は行われません (GNSS のようなモード)。
タグの数に制限はありません。
LEAPSマネージャー のデモ セレクターを使用して設定します。
2.1。 LEAPS Manager を開き、メイン ページから Demo Selector を選択します。
2.2。 ダウンリンク TDoA RTLS を選択します。
2.3。 Bluetooth 経由で検出されたデバイスのリストがリストに表示されます。必要に応じて、下にスワイプしてリストを更新します。
2.4。デモに使用するデバイスを選択します。上部の アンカー と タグ は、デモに必要なデバイスの数を示します。
2.5。 SAVE を押して、デバイスを LEAPS RTLS モード、ネットワーク プロファイル 2 (TWR+UL / DL-Data、DL-TDoA をサポート) に設定します。
2.6。 [アンカー設定] ポップアップ ウィンドウが表示され、アンカーの位置を設定するオプションが提供されます。必要に応じて、手動、自動位置決め、または 現在位置を維持 を選択し、OK を押します。
2.7。デバイスが起動すると、赤い LED が点滅することを目視で確認してください。

デバイスが正常に構成されると、LEAPS Demo Network ウィンドウが構成されたノードのリストとともに表示されます。
推奨: アラーム機能を使用してデバイスを識別し、正しい物理的な場所に移動します。
上部のドロップダウン メニューにある グリッド を開くか、位置アイコンをタップしてデバイスとその位置を視覚化します。
LEAPSマネージャー は プロファイル 2 (TWR+UL / DL-Data、DL-TDoA をサポート) に設定されていますが、自動状態です。したがって、地図上でタグの座標を確認できます。
(GIF 画像では、アンカーポイントが設定され、1 メートル離れて配置されます)
アプリケーションを使用してノードとネットワークを構成および視覚化する方法の詳細については、LEAPSマネージャー を参照してください。
高度なセットアップ
高度なセットアップの準備をしてください。ターミナルの能力を活用して、プロのようにデバイスを設定できるようにお手伝いします。以下の手順に従うだけで準備は完了です。
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 1 または USB-C データ ポート 2 を PC に接続します。
Putty、Teraterm、Minicom などの希望のターミナル アプリケーション、またはお気に入りのターミナル アプリケーションを使用してシリアル ポートに接続します。ボーレートを 115200 に設定する必要があります。
たとえば、Ubuntu (Linux) で Minicom を使用します。
minicom -b 115200 -D /dev/ttyACM0
シェル コンソールで ダブル Enter を押して、コマンド ライン制御システムにアクセスします。
たとえば、Ubuntu (Linux) では、/dev/ttyACM0 を開き、double Enter を押します。
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps>
デバイスごとに構成するには、次の手順を実行します。
デバイスをデフォルトにリセットし、frst コマンドを実行します。 (オプション)
$ leaps> frst frst ok
(デバイスが正常にリセットされるまで監視して待ちます。その後、:red:`ダブル Enter` を押してコマンド ライン制御システムにアクセスします。)
コマンド nps 2 を使用して、各デバイスの プロファイル 2 (TWR+UL / DL-Data、DL-TDoA をサポート) を設定します。
$ leaps> nps 2 nps: ok
nis コマンドを使用して、ネットワーク内のすべてのデバイスを設定します。
$ leaps> nis 0x1234 nis: ok
その後、デバイスをリセットする必要があります。設定を更新するにはデバイスをリセットする必要があります。 reset コマンドを使用してデバイスをリセットします。
$ leaps> reset reset ok
注釈
この例では、イニシエーターを有効にしたアンカー*、3 つのアンカー、タグ を構成します。
各アンカーとタグのモードを設定します。
イニシエータを有効にして アンカーを設定するには、コマンド nmi を使用してデバイスを設定します。
$ leaps> nmiその後、デバイスがリセットされ、コマンド ライン制御システムに再度アクセスするには、Enter キーを 2 回押します。
3 アンカー を設定するには、コマンド nma を使用して 3 つのデバイスをアンカー モードに設定しますが、イニシエーターは有効にしません。
$ leaps> nmaその後、デバイスがリセットされ、コマンド ライン制御システムに再度アクセスするには、Enter キーを 2 回押します。
a tag を設定するには、コマンド nmt を使用してデバイスをタグ モードに設定します
$ leaps> nmtその後、デバイスがリセットされ、コマンド ライン制御システムに再度アクセスするには、Enter キーを 2 回押します。
いずれかのアンカーのクロック基準を設定します。
少なくとも 1 つのアンカーが構成されています。
クロック参照を有効にしてアンカー を設定するには、コマンド acs cr を使用してデバイスを設定します。
$ leaps> acs cr 1その後、デバイスをリセットする必要があります。設定を更新するにはデバイスをリセットする必要があります。 reset コマンドを使用してデバイスをリセットします。
$ leaps> reset reset ok
各アンカーの実際の位置を設定します。
位置を取得するには、アンカーごとに pg コマンドを使用し、位置を設定するには、ps コマンドを使用します。
この例では、4 つのアンカーが 1 メートル間隔で配置され、正方形に配置されるように設定します。
leaps> ps 1000 1000 0 ps: ok leaps> pg pg: x:1000 y:1000 z:0 qf:100 leaps>leaps> ps 0 0 0 ps: ok leaps> pg pg: x:0 y:0 z:0 qf:100 leaps>leaps> ps 1000 0 0 ps: ok leaps> pg pg: x:1000 y:0 z:0 qf:100 leaps>leaps> ps 0 1000 0 ps: ok leaps> pg pg: x:0 y:1000 z:0 qf:100 leaps>
アンカーの構成が正常に完了したら、アンカーを物理的な正しい位置は 1 メートル離れています。
さらに、 LEAPSマネージャー を使用して、デバイスとその位置を視覚化することもできます。
各タグの設定により、測定に DL-TDoA テクノロジーを使用できるようになります。
設定するには、タグに対して tcs mode 2 コマンドを使用します。
$ leaps> tcs mode 2 tcs: ok
その後、構成を更新するにはデバイスをリセットする必要があります。 reset コマンドを使用してデバイスをリセットします。
$ leaps> reset reset ok
デフォルトでは、通常の更新レート は 0.1 秒/10Hz、定常的な更新レート は 5.0 秒/0.2Hz です。速度を上げるには、urs コマンドを使用します。
たとえば、通常の更新レート を 0.1 秒/ 10Hz に設定し、定常的な更新レート を 0.1 秒 / 10Hz に設定します。次のコマンドを実行します。
$ leaps> urs 1 1 urs: ok
ステップ 5、6、7、および 8 では、si コマンドを使用して、モード、プロファイル、およびネットワーク構成が正しいかどうかを確認できます。 (オプション)
たとえば、4 つのアンカーと 1 つのタグの場合:
mode: ani
panid=x1234
prof=2
cr=1leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> acs cr 1 nis: ok leaps> nmi Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000008.695 INF] release: LEAPS RTLS v0.15.0-ab84fb [000008.696 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000008.696 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000008.696 INF] uwb: tx_pwr=x34/xFAFAFAFA sts:shr:phr:data=27.7:27.7:27.7:27.7[dB] cpl=FCC/ETSI pgcnt=5 [000008.697 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=27 tx_delay=16438 rx_delay=16438 [000008.697 INF] uwb: panid=x1234 addr=xDECA0E27530083A2 [000008.700 INF] mode: ani (act,-) [000008.715 INF] uwbmac: disconnected prof=2 (manual) [000008.715 INF] uwbmac: bh disconnected [000008.716 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=1 uab=1 bh=auto bh_stat=off cr=1 upd_rate_stat=30 label=ID83A2 [000008.744 INF] enc: off [000008.744 INF] ble: addr=F8:64:22:75:6C:F7 leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> [000004.252 INF] uwbmac: connected leaps> si [000073.748 INF] release: LEAPS RTLS v0.15.0-ab84fb [000073.748 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000073.748 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000073.749 INF] uwb: tx_pwr=x34/xE6E6E6E6 sts:shr:phr:data=25.8:25.8:25.8:25.8[dB] cpl=FCC/ETSI pgcnt=25 [000073.749 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16438 rx_delay=16438 [000073.750 INF] uwb: panid=x1234 addr=xDECA9DD29FD0CBBB [000073.753 INF] mode: an (act,-) [000073.764 INF] uwbmac: connected prof=2 (manual) [000073.764 INF] uwbmac: bh disconnected [000073.764 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=IDCBBB [000073.796 INF] enc: off [000073.796 INF] ble: addr=E6:92:A3:6B:05:21 leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000031.142 INF] release: LEAPS RTLS v0.15.0-ab84fb [000031.142 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000031.143 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000031.143 INF] uwb: tx_pwr=x34/xEEEEEEEE sts:shr:phr:data=26.5:26.5:26.5:26.5[dB] cpl=FCC/ETS5 [000031.144 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16436 rx_delay=16436 [000031.144 INF] uwb: panid=x1234 addr=xDECA7A20DFE04F2E [000031.148 INF] mode: an (act,-) [000031.163 INF] uwbmac: connected prof=2 (manual) [000031.163 INF] uwbmac: bh disconnected [000031.163 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID4F2E [000031.190 INF] enc: off [000031.190 INF] ble: addr=C8:D9:F3:F1:7D:CE leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000004.702 INF] release: LEAPS RTLS v0.15.0-ab84fb [000004.703 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000004.703 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000004.703 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=2365 [000004.704 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000004.704 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000004.707 INF] mode: an (act,-) [000004.720 INF] uwbmac: connected prof=2 (manual) [000004.720 INF] uwbmac: bh disconnected [000004.720 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID468D [000004.751 INF] enc: off [000004.752 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: tn
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nmt Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> tcs mode 2 tcs: ok leaps> urs 1 1 urs: ok leaps> reset reset ok Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000006.325 INF] release: LEAPS RTLS v0.15.0-ab84fb [000006.325 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000006.326 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000006.326 INF] uwb: tx_pwr=x34/xB6B6B6B6 sts:shr:phr:data=21.1:21.1:21.1:21.1[dB] cpl=FCC/ETSI pgcnt=231 temp=25 [000006.327 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=43 tx_delay=16434 rx_delay=16434 [000006.327 INF] uwb: panid=x1234 addr=xDECA80CB2C558A11 [000006.330 INF] mode: tn (act,rtdoa,np,le) [000006.346 INF] uwbmac: connected prof=2 (manual) [000006.346 INF] uwbmac: bh disconnected [000006.347 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=2 upd_rate_norm=1 upd_rate_stat=1 label=ID8A11 [000006.374 INF] enc: off [000006.374 INF] ble: addr=E8:BB:0A:C9:93:4E leaps>
範囲内にあり、デバイス自体に接続されているアンカーのリストを表示するには、la コマンドを使用します。 (オプション)
たとえば、アンカー 1 (イニシエーターを有効にする) では次のようになります:
leaps> la [001330.813 INF] AN: cnt=4 seq=x03 [001330.813 INF] 0) id=83A2 seat=0 clk_lvl=0 seens=0 rssi=-127 cl=0000000F nbr=0000000F pos=1.00:1.00:0.00 [001330.814 INF] 1) id=4F2E seat=2 clk_lvl=1 seens=205 rssi=-55 cl=0000000F nbr=00000000 pos=1.00:0.00:0.00 [001330.814 INF] 2) id=468D seat=3 clk_lvl=1 seens=223 rssi=-55 cl=0000000F nbr=00000000 pos=0.00:1.00:0.00 [001330.814 INF] 3) id=CBBB seat=1 clk_lvl=1 seens=224 rssi=-55 cl=0000000F nbr=00000000 pos=0.00:0.00:0.00 [001330.815 INF] leaps>
これで、システムは正常にセットアップされ、構成されました。楽しく使ってください!
Bluetooth Low Energy (BLE) と LED が両方ともオフの場合、ユーザーはボードが機能していないと誤って認識する可能性があります。このシナリオでは、ユーザーの唯一の手段は、工場出荷時設定へのリセット (frst) コマンドを開始することです。
インストールプロセスに関連するいくつかの問題を修正するためのヒントをいくつか紹介します。
バージョンを確認してください。最新の正式バージョンを使用することをお勧めします。
デバイスの現在の状態がわからない場合は、LEAPSマネージャー のデモ セレクターの デバイスをデフォルトにリセット 機能を使用します。次のGIF画像を参照してください。
注釈
ダウンリンク TDoA RTLS デモの位置データは、別の通信チャネルを通じて送信されます。
For any comments or questions about our products, we encourage you to visit our LEAPS Forum.
既知の制限と問題リストの詳細については、セクション Releases を参照してください。