インフラレス近接デモ
セットアップの準備
LEAPSマネージャー アプリケーションがインストールされました。
少なくとも 2 つの LC14 または LC13 デバイス。
デバイスに電力を供給するためのバッテリーまたは USB-C ケーブル。
オプション: Putty、Teraterm、minicom、またはコンピュータにインストールされているお気に入りのターミナル アプリケーション。
セットアップ時間: 2 分未満
概要
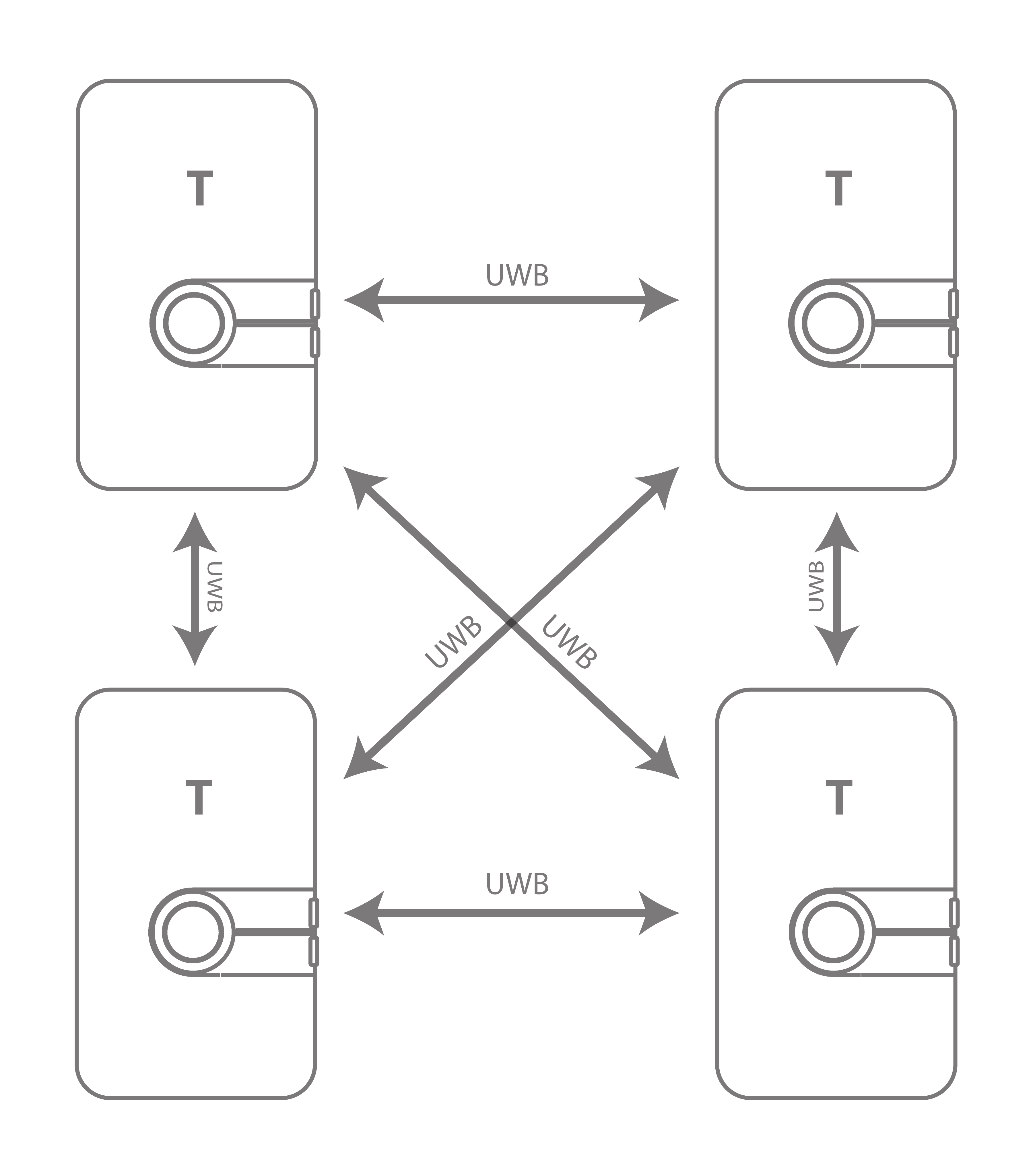
このデモは、Two Way Ranging (TWR) 測定技術に基づいた、インフラストラクチャを使用しないノード間の近接検出を示します。ノードが近接している場合、すべてのノードによってアラームがトリガーされます。アラームは LED、ハプティック モーター、またはブザーを使用し、しきい値は設定可能です。
典型的なアプリケーション: 衝突回避、社会的距離、群の調整。
セットアップ手順
デバイスの電源を ON にします。。
デバイスは、Bluetooth を使用して周囲のデバイスを検出し、UWB を使用して検出されたデバイスまでの距離を測定する独立したタグとして機能します。
LEAPSマネージャー のデモ セレクターを使用して設定します。
2.1。 LEAPS Manager を開き、メイン ページから Demo Selector を選択します。
2.2。 インフラストラクチャのない近接性 を選択します。
2.3。 Bluetooth 経由で検出されたデバイスのリストがリストに表示されます。必要に応じて、下にスワイプしてリストを更新します。
2.4。デモに使用するデバイスを選択します。上側の``ノード``は、デモに必要なデバイスの数を示します。
2.5。 SAVE を押して、デバイスを LEAPS RTLS モード、タグメッシュ ネットワーク プロファイルに設定します。
2.6。デバイスが起動すると、赤い LED が点滅することを目視で確認してください。
デバイスは インフラレス近接デモ 用に構成されています。
デフォルトでは、デバイスが互いに 2.5 メートル以内に近づくと、アラームが作動します (赤色の LED とブザーで示されます)。デバイスが近づくにつれて、アラームの強度が増加します。
最初に、デバイスは低強度のビープ音を発し、赤色 LED が点滅します。上下ボタンでビープ音の音量を調整でき、バイブレーションも有効になります。
以下に概説するデモでは、デバイスには 2 つの近接しきい値があります。最初のしきい値は 0.2 メートルに設定され、2 番目のしきい値は 0.5 メートルに設定されています。
アプリケーションを使用してノードとネットワークを構成および視覚化する方法の詳細については、LEAPSマネージャー を参照してください。
高度なセットアップ
高度なセットアップの準備をしてください。ターミナルの能力を活用して、プロのようにデバイスを設定できるようにお手伝いします。以下の手順に従うだけで準備は完了です。
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 1 または USB-C データ ポート 2 を PC に接続します。
Putty、Teraterm、Minicom などの任意のターミナル アプリケーション、またはお気に入りのターミナル アプリケーションを使用してシリアル ポートに接続します。ボーレートを 115200 に設定する必要があります。
たとえば、Ubuntu (Linux) で Minicom を使用します。
minicom -b 115200 -D /dev/ttyACM0
シェル コンソールで ダブル Enter を押して、コマンド ライン制御システムにアクセスします。
たとえば、Ubuntu (Linux) では、/dev/ttyACM0 を開き、double Enter を押します。
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps>
次の手順に従って各デバイスを構成します。
デバイスをデフォルトにリセットし、frst コマンドを実行します。 (オプション)
$ leaps> frst frst ok
(デバイスが正常にリセットされるまで監視して待ちます。その後、Enter キーを 2 回押してコマンド ライン制御システムにアクセスします。)
コマンド nps 4 を使用して、各デバイスの プロファイル 4 (タグ メッシュ プロキシミティをサポート) を設定します。
$ leaps> nps 4 nps: ok
nis コマンドを使用して、ネットワーク内のすべてのデバイスを設定します。
$ leaps> nis 0x1234 nis: ok
コマンド nmt を使用して、タグ モードを更新します。
$ leaps> nmt(次に、デバイスが正常に設定されるまで監視して待ちます。その後、Enter キーを 2 回押して、コマンド ライン制御システムに再度アクセスします。)
si コマンドを使用して、モード、プロファイル、ネットワークなどの構成を確認します。
leaps> si [000028.754 INF] release: LEAPS RTLS v0.15.0-ab84fb [000028.754 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000028.754 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto10 [000028.754 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=236 temp=5 [000028.755 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000028.755 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000028.758 INF] mode: tn (act,twr,np,le) [000028.774 INF] uwbmac: connected prof=4 (manual) [000028.774 INF] uwbmac: bh disconnected [000028.774 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=0 upd_rate_norm=1 upd_D [000028.802 INF] enc: off [000028.802 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: tn
panid=x1234
prof=4
デバイスの起動時に 赤い LED が点滅することを目視で確認してください。
注釈
この例では、2 つのタグ を構成します。
デバイスを構成した後、BLE 経由ですべてのデバイスをスキャンします。デバイスが許容距離内にある場合、自動的に UWB が再アクティブ化され、互いの距離が測定されます。
すべてのデバイスを表示するには、ln コマンドを使用します。これはすべての UDK1 デバイスで使用できます。
$ leaps> ln [000005.713 INF] TN: cnt=2 size=100 [000005.713 INF] 0) id=468D dist=0.40,xDD [000005.713 INF] 1) id=4F2E dist=0.00,xBD [000005.713 INF]$ leaps> ln [000033.319 INF] TN: cnt=2 size=100 [000033.319 INF] 0) id=468D dist=0.00,x00 [000033.320 INF] 1) id=4F2E dist=0.44,x66 [000033.320 INF]
インフラレス近接デモ 内。
デフォルトでは、デバイスが互いに 2.5 メートル以内に近づくと、アラームが作動します (赤色の LED とブザーで示されます)。デバイスが近づくにつれて、アラームの強度が増加します。
最初に、デバイスは低強度のビープ音を発し、赤色 LED が点滅します。上下ボタンでビープ音の音量を調整でき、バイブレーションも有効になります。
ユーザーは、dacg コマンドと dacs コマンドの 2 つのコマンドを使用して、この距離を表示および構成できます。
たとえば、0.2 メートルと 0.5 メートルの 2 つのしきい値を表示および設定します。次のコマンドを実行します。
表示するには:
$ leaps> dacg dacg: thold_1=200 thold_2=500 mincon=2 minnocon=2 opt=7
設定するには:
$ leaps> dacs 200 500 2 2 7 dacs: ok以下の GIF 画像では、デバイスはしきい値 1 が 0.2 メートル、しきい値 2 が 0.5 メートルで構成されています。
設定後、タグのシェル コンソールを開いて、les コマンドを使用してタグの位置を表示できます。
$ leaps> les leaps> POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.54 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.57 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.58 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.59 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.51 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.47 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.43 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.40 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.35 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.32 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.31 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.29 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.27 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.22 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.19 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.16 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.14 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.12 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.09 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.08 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.05 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.09 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.11 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.13 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.15 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.17 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.19 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.21 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.23 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.42 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.51 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.56 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.60 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.62 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.64 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.67 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.69 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.71 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.73 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.73
これで、システムは正常にセットアップされ、構成されました。楽しく使ってください!
Bluetooth Low Energy (BLE) と LED が両方ともオフの場合、ユーザーはボードが機能していないと誤って認識する可能性があります。このシナリオでは、ユーザーの唯一の手段は、工場出荷時設定へのリセット (frst) コマンドを開始することです。
インストールプロセスに関連するいくつかの問題を修正するためのヒントをいくつか紹介します。
バージョンを確認してください。最新の正式バージョンを使用することをお勧めします。
デバイスの現在の状態がわからない場合は、LEAPSマネージャー のデモ セレクターの デバイスをデフォルトにリセット 機能を使用します。次のGIF画像を参照してください。
注意
プロファイル 4 に関連
デバイスがアンカー モードまたはイニシエーター モードの場合、ユーザーはプロファイル 4 に切り替えてはなりません。
設定された更新レートの値は <1 以内に制限する必要があります。 10>。
注釈
距離のしきい値は API 経由で構成できます。
For any comments or questions about our products, we encourage you to visit our LEAPS Forum.
既知の制限と問題リストの詳細については、セクション Releases を参照してください。