High-speed Downlink TDoA RTLS Demo
Prepare for setup
LEAPS Manager application installed.
At least five LC14 devices.
Batteries or USB-C cables for powering the devices.
Recommended: clamp or tripod with a camera mount for attachment of the Anchor devices.
Optional: Putty, Teraterm, minicom or your favorite terminal application installed on your computer.
Setup time: less than 5 minutes
Overview
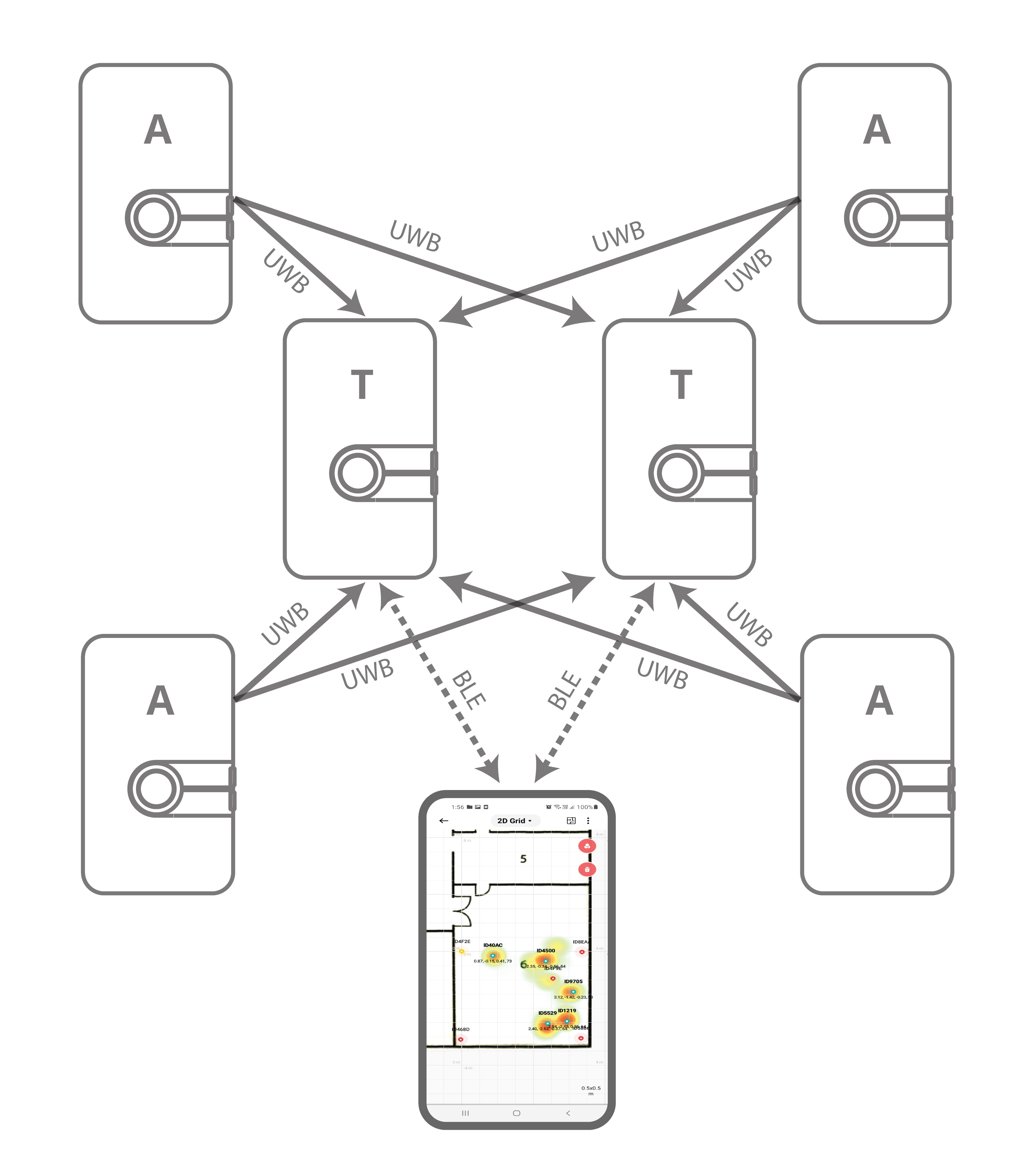
This setup demonstrates high-speed real-time navigation of an unlimited amount of Tags in receive-only mode with complete privacy using the Downlink Time Difference of Arrival (DL-TDoA) technology. Each Tag can provide a location up to 50 Hz independently of the others and demonstrates the LEAPS Manager application with Tag position navigation.
Typical applications: high-speed indoor navigation with mapping, autonomous robot and vehicle navigation, and asset tracking with location data being sent through another communication channel.
Setup instructions
Power ON the devices.
The statically mounted devices will function as Anchors, providing location information to the Tags.
The moving devices will function as Tags configured in navigation mode in receive mode only, with no transmission (GNSS-like mode).
There is no limit on the amount of Tags.
Configure using the Demo Selector in the LEAPS Manager:
2.1. Open the LEAPS Manager and select the Demo Selector from the main page.
2.2. select the High-Speed Downlink TDoA RTLS.
2.3. A list of discovered devices via Bluetooth will appear on the list. Swipe down to update the list if needed.
2.4. Select the devices that will be used for the demo. The anchors and tags on the top side indicate the devices needed for the demo.
2.5. Press the SAVE to configure the device(s) into the LEAPS RTLS mode, networking profile 3 (support High-Speed DL-TDoA).
2.6. A pop-up window Anchor Configuration will appear to offer the options to configure the Anchor’s positions. select the Manual, Auto positioning or Keep current position depending on the need, then Press the OK.
2.7. Please check visually that the RED LED blinks when the device starts.

When the devices are configured successfully, the LEAPS Demo Network window will appear with a list of configured nodes.
Recommended: Use the alarm feature to identify the device, and move it to the correct physical location.
Open the Grid, located at the top drop down menu, is for visualization of the devices and their positions.
The LEAPS Manager configured to profile 3 (support High-Speed DL-TDoA) but in auto state. So we can see the tag’s coordinates on the map.
(In GIF Images, anchor points are configured, and placed 1 meter apart)
Please refer to the LEAPS Manager for more details on how to use the application to configure and visualize the nodes and network.
Advanced setup
Get ready for the advanced setup! We’ll tap into the terminal’s power to help you configure your device like a pro. Just follow these steps and you’ll be all set.
Use a USB-C Data Cable to connect the USB-C Data Port 1 or USB-C Data Port 2 of devices to your PC.
Connect to a serial port using your desired terminal application, such as Putty, Teraterm, Minicom, or your favorite terminal application. We need to configure the baud rate to 115200.
For example use Minicom, on Ubuntu (Linux):
minicom -b 115200 -D /dev/ttyACM0
Press double enter on the shell console to access the command line control system
For example open /dev/ttyACM0 and press double enter, on Ubuntu (Linux):
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps>
Configure for each device, do the following steps:
Reset devices to default, run the frst command. (optional)
$ leaps> frst frst ok
(Monitor and wait for the device to reset successfully. Then press double enter to access the command line control system.)
Use the command nps 3 to configure profile 3 (support High-Speed DL-TDoA) for each device.
$ leaps> nps 3 nps: ok
Use the nis command to configure all devices in a network.
$ leaps> nis 0x1234 nis: ok
Then, it is neccessary to reset the device to update the configuration. Use the reset command to reset the device.
$ leaps> reset reset ok
Note
In this example, we will configure an anchor with enable initiator, 3 anchors, and a tag.
Configure the mode for each anchor and tag.
To configure an anchor with enable initiator, use the command nmi to configure a device.
$ leaps> nmiThen, the device will reset, and to access the command line control system again, press double enter.
To configure 3 anchors, use the command nma to configure 3 devices to anchor mode, but do not enable initiator.
$ leaps> nmaThen, the device will reset, and to access the command line control system again, press double enter.
To configure a tag, use the command nmt to configure a device to tag mode
$ leaps> nmtThen, the device will reset, and to access the command line control system again, press double enter.
Configure the clock reference for one of the anchors.
At least one anchor is configured.
To configure an anchor with enable clock reference, use the command acs cr to configure a device.
$ leaps> acs cr 1Then, it is neccessary to reset the device need to reset the device to update the configuration. Use the reset command to reset the device.
$ leaps> reset reset ok
Configure the actual position for each anchor.
To get the position use pg command and to set the position use ps command for each anchor.
In this example, we will configure 4 anchors are placed 1 meter apart and arranged in a square shape:
leaps> ps 1000 1000 0 ps: ok leaps> pg pg: x:1000 y:0 z:1000 qf:100 leaps>leaps> ps 0 0 0 ps: ok leaps> pg pg: x:0 y:0 z:0 qf:100 leaps>leaps> ps 1000 0 0 ps: ok leaps> pg pg: x:1000 y:0 z:0 qf:100 leaps>leaps> ps 0 1000 0 ps: ok leaps> pg pg: x:0 y:1000 z:0 qf:100 leaps>
After successfully configuring the anchors, move it to the correct physical location 1 meter apart.
Besides, we can use the LEAPS Manager, to visualization of the devices and their positions.
Configuration for each tag allows the use of DL-TDoA technology for measurement.
To configure, use the tcs mode 2 command for a tag.
$ leaps> tcs mode 2 tcs: ok
Then, it is neccessary to reset the device to update the configuration. Use the reset command to reset the device.
$ leaps> reset reset ok
By default normal update rate is 0.1s/ 10Hz and stationary update rate is 5.0s/ 0.2Hz. To increase speed, use urs command.
For example, configure normal update rate to 0.02s/ 50Hz and, stationary update rate is 0.02s/ 50Hz. Run the following command:
$ leaps> urs 1 1 urs: ok
In steps 5, 6, 7 and, 8 can use the si command to verify whether the mode, profile, and network configurations are correct. (optional)
For example on 4 anchors and a tag:
mode: ani
panid=x1234
prof=3
cr=1leaps> nps 3 nps: ok leaps> nis 0x1234 nis: ok leaps> acs cr 1 nis: ok leaps> nmi Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000016.597 INF] release: LEAPS RTLS v0.15.0-ab84fb [000016.597 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000016.598 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000016.598 INF] uwb: tx_pwr=x34/xFAFAFAFA sts:shr:phr:data=27.7:27.7:27.7:27.7[dB] cpl=FCC/ETSI pgcnt=234 temp=25 [000016.599 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=27 tx_delay=16438 rx_delay=16438 [000016.599 INF] uwb: panid=x1234 addr=xDECA0E27530083A2 [000016.602 INF] mode: ani (act,real) [000016.618 INF] uwbmac: connected prof=3 (manual) [000016.618 INF] uwbmac: bh disconnected [000016.618 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=1 uab=1 bh=auto bh_stat=off cr=1 upd_rate_stat=30 label=ID83A2 [000016.645 INF] enc: off [000016.645 INF] ble: addr=F8:64:22:75:6C:F7 leaps>
mode: an
panid=x1234
prof=3leaps> nps 3 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000005.559 INF] release: LEAPS RTLS v0.15.0-ab84fb [000005.560 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000005.560 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000005.560 INF] uwb: tx_pwr=x34/xE6E6E6E6 sts:shr:phr:data=25.8:25.8:25.8:25.8[dB] cpl=FCC/ETSI pgcnt=233 temp=25 [000005.561 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16438 rx_delay=16438 [000005.561 INF] uwb: panid=x1234 addr=xDECA9DD29FD0CBBB [000005.564 INF] mode: an (act,-) [000005.580 INF] uwbmac: connected prof=3 (manual) [000005.580 INF] uwbmac: bh disconnected [000005.580 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=IDCBBB [000005.607 INF] enc: off [000005.608 INF] ble: addr=E6:92:A3:6B:05:21 leaps>
mode: an
panid=x1234
prof=3leaps> nps 3 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000011.647 INF] release: LEAPS RTLS v0.15.0-ab84fb [000011.648 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=38%:1634mV:discharging board=LC14_B [000011.648 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000011.648 INF] uwb: tx_pwr=x34/xEEEEEEEE sts:shr:phr:data=26.5:26.5:26.5:26.5[dB] cpl=FCC/ETSI pgcnt=245 temp=25 [000011.649 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16436 rx_delay=16436 [000011.649 INF] uwb: panid=x1234 addr=xDECA7A20DFE04F2E [000011.668 INF] mode: an (act,-) [000011.668 INF] uwbmac: connected prof=3 (manual) [000011.668 INF] uwbmac: bh disconnected [000011.668 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID4F2E [000011.692 INF] enc: off [000011.692 INF] ble: addr=C8:D9:F3:F1:7D:CE leaps>
mode: an
panid=x1234
prof=2leaps> nps 3 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000006.200 INF] release: LEAPS RTLS v0.15.0-ab84fb [000006.200 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000006.200 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000006.200 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=236 temp=25 [000006.201 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000006.201 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000006.205 INF] mode: an (act,-) [000006.220 INF] uwbmac: connected prof=3 (manual) [000006.220 INF] uwbmac: bh disconnected [000006.220 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID468D [000006.249 INF] enc: off [000006.249 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: tn
panid=x1234
prof=3leaps> nps 3 nps: ok leaps> nis 0x1234 nis: ok leaps> nmt Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> tcs mode 2 tcs: ok leaps> urs 1 1 urs: ok leaps> reset reset ok Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000006.162 INF] release: LEAPS RTLS v0.15.0-ab84fb [000006.162 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000006.162 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000006.163 INF] uwb: tx_pwr=x34/xB6B6B6B6 sts:shr:phr:data=21.1:21.1:21.1:21.1[dB] cpl=FCC/ETSI pgcnt=231 temp=25 [000006.163 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=43 tx_delay=16434 rx_delay=16434 [000006.164 INF] uwb: panid=x1234 addr=xDECA80CB2C558A11 [000006.167 INF] mode: tn (act,rtdoa,np,le) [000006.183 INF] uwbmac: connected prof=3 (manual) [000006.183 INF] uwbmac: bh disconnected [000006.183 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=2 upd_rate_norm=1 upd_rate_stat=1 label=ID8A11 [000006.210 INF] enc: off [000006.211 INF] ble: addr=E8:BB:0A:C9:93:4E leaps>
To check the list of anchors currently connected to the device itself, use the la command. (optional)
For example on an anchor 1 (enable initiator):
leaps> la [000033.364 INF] AN: cnt=4 seq=x03 [000033.364 INF] 0) id=83A2 seat=0 clk_lvl=0 seens=0 rssi=-127 cl=0000001D nbr=0000001D pos=1.00:1.00:0.00 [000033.364 INF] 1) id=468D seat=4 clk_lvl=1 seens=235 rssi=-55 cl=0000001D nbr=00000000 pos=0.00:1.00:0.00 [000033.365 INF] 2) id=4F2E seat=2 clk_lvl=1 seens=193 rssi=-55 cl=0000001D nbr=00000000 pos=1.00:0.00:0.00 [000033.365 INF] 3) id=CBBB seat=3 clk_lvl=1 seens=6 rssi=-55 cl=0000001D nbr=00000000 pos=0.00:0.00:0.00 [000033.366 INF]
Now the system has been successfully set up and configured the system. Enjoy using it!
When Bluetooth Low Energy (BLE) and the LED are both off, users may erroneously perceive the board as non-functional. In this scenario, the only recourse for the user is to initiate a Factory Reset (frst) command.
Here are some tips for fixing some issues related to the installation process.
Please check the version. We recommend you use the latest official version.
Use the Reset devices to default feature in Demo Selector on the LEAPS Manager when you don’t know the current state of the devices. Refer to the following GIF Image.
Note
High-speed Downlink TDoA RTLS Demo location data will be sent through another communication channel.
For any comments or questions about our products, we encourage you to visit our LEAPS Forum.
For detail of known limitation and issue list, please refer section Releases.