上行链路 TDoA RTLS 演示
准备设置
LEAPS Manager 应用程序已安装。
一台Raspberry Pi 3B或更新版本,或一台用于安装数据服务器和网络应用程序的 PC。
至少五台LC14设备。
用于为设备供电的电池或USB-C电缆。
推荐:夹具或带相机支架的三脚架,用于安装主播设备
可选: Putty, Teraterm, minicom 或计算机上安装的您最喜欢的终端应用程序
设置时间: 少于 5 分钟
概览
该设置展示了使用 上行链路到达时间差 (UL-TDoA) 技术对标签进行高精度的实时追踪。
典型应用:资产和人员跟踪。
设置说明
Power ON 设备。
设备静态安装的设备将作为锚点,为标签提供位置信息。
移动设备将作为上行链路TDoA测量模式下配置的标签。
使用 LEAPS Manager 中的演示选择器进行配置:
2.1。 打开LEAPS Manager,从主页中选择 演示选择器。
选择 上行链路TDoA RTLS。
2.3。 通过Bluetooth发现的设备列表将显示在列表中。 如果需要,向下滑动以更新列表。
2.4. 选择用于演示的设备. 顶部的 anchors 和 tags 表示演示所需的设备数量。
2.5. 按下 SAVE 将设备配置为 LEAPS RTLS 模式,联网 配置文件 5 (支持 UL-TDoA)。
2.6。 弹出的锚点配置窗口会提供锚点位置的配置选项,根据需要选择 手册 或 保持当前位置,然后按下 OK。
自动定位目前不适用于配置文件 5.。
2.7. 请目测设备启动时 RED LED 是否闪烁。
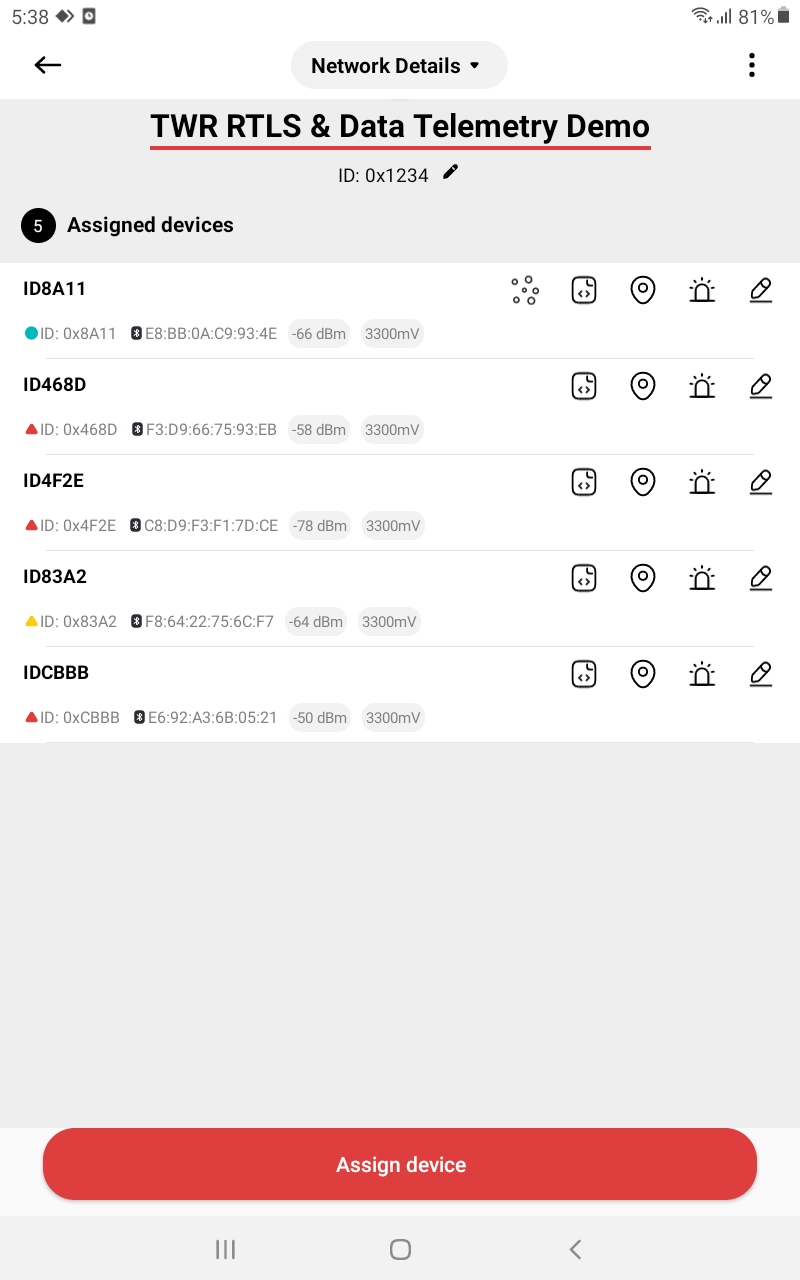
当设备配置成功后,LEAPS演示网络窗口会出现已配置节点的列表
推荐: 使用 使用警报功能来识别设备,并将其移动到正确的物理位置
打开位于顶端下拉菜单的 Grid 网格,用于显示设备及其位置。
请参阅 LEAPS Manager,了解如何使用应用程序来配置和可视化节点和网络。
高级设置
准备好进行高级设置!我们将利用终端的强大功能,帮助你像专业人士一样配置你的设备。 只需按照以下步骤,你就能完成所有设置。
使用 USB-C 数据线将设备的 USB-C Data Port 1 或 USB-C Data Port 2 连接到 PC。
使用你想要的终端应用程序,例如 Putty, Teraterm, Minicom 或你最喜欢的终端应用程序,连接到串行端口. 我们需要将波特率设置为 115200。
例如在 Ubuntu (Linux) 上使用 Minicom:
minicom -b 115200 -D /dev/ttyACM0
在 shell 控制台按下 双输入 访问命令行控制系统
例如,在 Ubuntu (Linux) 上打开 /dev/ttyACM0 并按下 双击回车键:
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps>
为每个设备进行配置,请执行以下步骤:
将设备重置为默认设置,运行 frst 命令. (可选)
$ leaps> frst frst ok
(监控并等待设备重置成功. 然后按双击回车键,进入命令行控制系统.)
使用 nps 5 命令,为每个设备配置 配置文件5 (支持 UL-TDoA)。
$ leaps> nps 5 nps: ok
使用 nis 命令来配置网络中的所有设备。
$ leaps> nis 0x1234 nis: ok
然后,需要重置设备以更新配置. 使用 reset 命令重置设备。
$ leaps> reset reset ok
注解
在这个例子里,我们将配置一个**锚点和启用启动器**,3锚点,以及**一个标签**。
为每个锚点和标签配置模式。
要配置 使用启用启动器锚定,请使用 nmi 命令配置设备。
$ leaps> nmi然后,设备将重置,要再次进入命令行控制系统,请按双回车键。
要配置 3 锚点,请使用 nma 命令将 3 台设备配置为锚点模式,但不要启用启动器。
$ leaps> nma然后,设备将重置,要再次进入命令行控制系统,请按双回车键。
要配置 a tag,使用 nmt 命令将一个设备配置为标签模式。
$ leaps> nmt然后,设备将重置,要再次进入命令行控制系统,请按双回车键。
为其中一个锚点配置时钟基准。
至少配置了一个锚点。
要配置 带有启用时钟参考的锚点,请使用 acs cr 命令配置设备。
$ leaps> acs cr 1然后,有必要重置设备.需要重置设备以更新配置.使用 reset 命令重置设备。
$ leaps> reset reset ok
配置每个锚点的实际位置。
使用 pg 命令获取位置,使用 ps 命令设置每个锚点的位置。
在这个例子中,我们将配置 4 个锚点,每个锚点相距 3 米,呈正方形排列:
leaps> ps 3000 3000 0 ps: ok leaps> pg pg: x:5000 y:5000 z:0 qf:100 leaps>leaps> ps 0 0 0 ps: ok leaps> pg pg: x:0 y:0 z:0 qf:100 leaps>leaps> ps 3000 0 0 ps: ok leaps> pg pg: x:3000 y:0 z:0 qf:100 leaps>leaps> ps 0 3000 0 ps: ok leaps> pg pg: x:0 y:3000 z:0 qf:100 leaps>
成功配置锚点后,将其移动到相距 1 米的正确物理位置。
每个标签的配置允许使用 UL-TDoA 技术进行测量。
要进行配置,请对标签使用 tcs mode 1 命令。
$ leaps> tcs mode 1 tcs: ok
然后,需要重置设备以更新配置. 使用 reset 命令重置设备。
$ leaps> reset reset ok
默认情况下 正常更新率 为 0.1s/ 10Hz,固定更新率 为 5.0s/ 0.2Hz.要提高速度,请使用 urs 命令。
例如,配置 正常更新率 为 0.1s/ 10Hz,而 固定更新率 为 0.1s/ 10Hz. 运行以下命令:
$ leaps> urs 1 1 urs: ok
在步骤 5, 7 和 8 中,可以使用 si 命令来验证模式, 配置文件和网络配置是否正确。 (可选)
例如在 4 个锚点和一个标签上:
mode: ani
panid=x1234
prof=5leaps> nps 5 nps: ok leaps> nis 0x1234 nis: ok leaps> nmi Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps>si [000412.823 INF] release: LEAPS RTLS v0.16.4-a916a6 [000412.824 INF] sys: main main_ver=x02040001 cfg_ver=x01040000 batt=none board=LC14_B [000412.824 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000412.825 INF] uwb: tx_pwr=x34/xD6D6D6D6 sts:shr:phr:data=24.2:24.2:24.2:24.2[dB] cpl=FCC/ETSI pgcnt=232 temp=25 [000412.826 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=37 tx_delay=16436 rx_delay=16436 [000412.827 INF] uwb: panid=x1234 addr=xDECAD674FD208EAA [000412.828 INF] mode: ani (act,real) [000412.851 INF] uwbmac: connected prof=5 (manual) [000412.851 INF] uwbmac: bh disconnected [000412.852 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=1 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID8EAA [000412.852 INF] enc: off [000412.872 INF] ble: addr=F0:26:43:8B:52:4A leaps>
mode: an
panid=x1234
prof=5leaps> nps 5 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps>si [000454.748 INF] release: LEAPS RTLS v0.16.4-a916a6 [000454.749 INF] sys: main main_ver=x02040001 cfg_ver=x01040000 batt=none board=LC14_B [000454.749 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000454.750 INF] uwb: tx_pwr=x34/xCECECECE sts:shr:phr:data=23.4:23.4:23.4:23.4[dB] cpl=FCC/ETSI pgcnt=238 temp=25 [000454.751 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16426 rx_delay=16426 [000454.752 INF] uwb: panid=x1234 addr=xDECA229121E05886 [000454.753 INF] mode: an (act,-) [000454.766 INF] uwbmac: connected prof=5 (manual) [000454.766 INF] uwbmac: bh disconnected [000454.767 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID5886 [000454.797 INF] enc: off [000454.798 INF] ble: addr=FD:3F:4A:2F:BD:F0 leaps>
mode: an
panid=x1234
prof=5leaps> nps 5 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps> si [000496.390 INF] release: LEAPS RTLS v0.16.4-a916a6 [000496.390 INF] sys: main main_ver=x02040001 cfg_ver=x01040000 batt=none board=LC14_B [000496.390 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000496.391 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=236 temp=25 [000496.392 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000496.393 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000496.394 INF] mode: an (act,-) [000496.413 INF] uwbmac: connected prof=5 (manual) [000496.414 INF] uwbmac: bh disconnected [000496.414 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID468D [000496.438 INF] enc: off [000496.439 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: an
panid=x1234
prof=5leaps> nps 5 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps> si [000535.583 INF] release: LEAPS RTLS v0.16.4-a916a6 [000535.583 INF] sys: main main_ver=x02040001 cfg_ver=x01040000 batt=none board=LC14_B [000535.584 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000535.585 INF] uwb: tx_pwr=x34/xEEEEEEEE sts:shr:phr:data=26.5:26.5:26.5:26.5[dB] cpl=FCC/ETSI pgcnt=245 temp=25 [000535.586 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16436 rx_delay=16436 [000535.587 INF] uwb: panid=x1234 addr=xDECA7A20DFE04F2E [000535.588 INF] mode: an (act,-) [000535.599 INF] uwbmac: connected prof=5 (manual) [000535.599 INF] uwbmac: bh disconnected [000535.632 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID4F2E [000535.632 INF] enc: off [000535.633 INF] ble: addr=C8:D9:F3:F1:7D:CE leaps>
根据默认配置,设备将处于 TWR 模式. 如果是其他模式,我们会使用 tcs mode 0 命令。
mode: tn
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nmt Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2024 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-licee Compiled : Nov 4 2024 12:30:29 (v0.16.4-a916a6 Help : ? or help leaps> urs 1 1 urs: ok leaps> si [000248.294 INF] release: LEAPS RTLS v0.16.4-a916a6 [000248.294 INF] sys: main main_ver=x02040001 cfg_ver=x01040000 batt=none board=LC13_B [000248.294 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000248.295 INF] uwb: tx_pwr=x34/xCDCDCDCD sts:shr:phr:data=21.7:21.7:21.7:21.7[dB] cpl=FCC/ETSI pgcnt=234 temp=25 [000248.295 INF] uwb: lna=1 pa=0 rf1=1 rf2=1 xtaltrim=13 tx_delay=16443 rx_delay=16443 [000248.295 INF] uwb: panid=x1234 addr=xDECA2B16DD209705 [000248.299 INF] mode: tn (act,tdoa,np,le) [000248.314 INF] uwbmac: disconnected prof=5 (manual) [000248.314 INF] uwbmac: bh disconnected [000248.314 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=1 upd_rate_norm=1 upd_rate_stat=1 label=ID9705 [000248.342 INF] enc: off [000248.342 INF] ble: addr=E0:2C:84:68:AD:16 leaps>
要查看范围内连接到设备本身的锚点列表,请使用 la 命令。 (可选)
例如在锚点 1 上(启用启动器):
leaps> la [000414.009 INF] AN: cnt=4 seq=x03 [000414.009 INF] 0) id=8EAA seat=0 clk_lvl=0 seens=0 rssi=-127 cl=00000039 nbr=00000039 pos=3.00:3.00:0.00 [000414.010 INF] 1) id=4F2E seat=4 clk_lvl=1 seens=212 rssi=-127 cl=00000039 nbr=00000000 pos=0.00:3.00:0.00 [000414.011 INF] 2) id=5886 seat=5 clk_lvl=1 seens=178 rssi=-127 cl=00000039 nbr=00000000 pos=3.00:0.00:0.00 [000414.012 INF] 3) id=468D seat=3 clk_lvl=1 seens=145 rssi=-127 cl=00000039 nbr=00000000 pos=0.00:0.00:0.00 [000414.012 INF] leaps>
完成所有配置后. 我们可以使用 LEAPS Manager 来可视化设备及其位置。


当低功耗Bluetooth (BLE) 和 LED 同时关闭时,用户可能会错误地认为电路板无法工作。在这种情况下,用户唯一的办法就是启动出厂重置 (frst) 命令。
这里有一些解决安装过程中相关问题的提示。
请检查版本. 我们建议您使用最新的官方版本。
当你不知道设备的当前状态时,请在 LEAPS Manager 的演示选择器中使用 将设备重置为默认值 功能. 请参考下面的 GIF 图片。
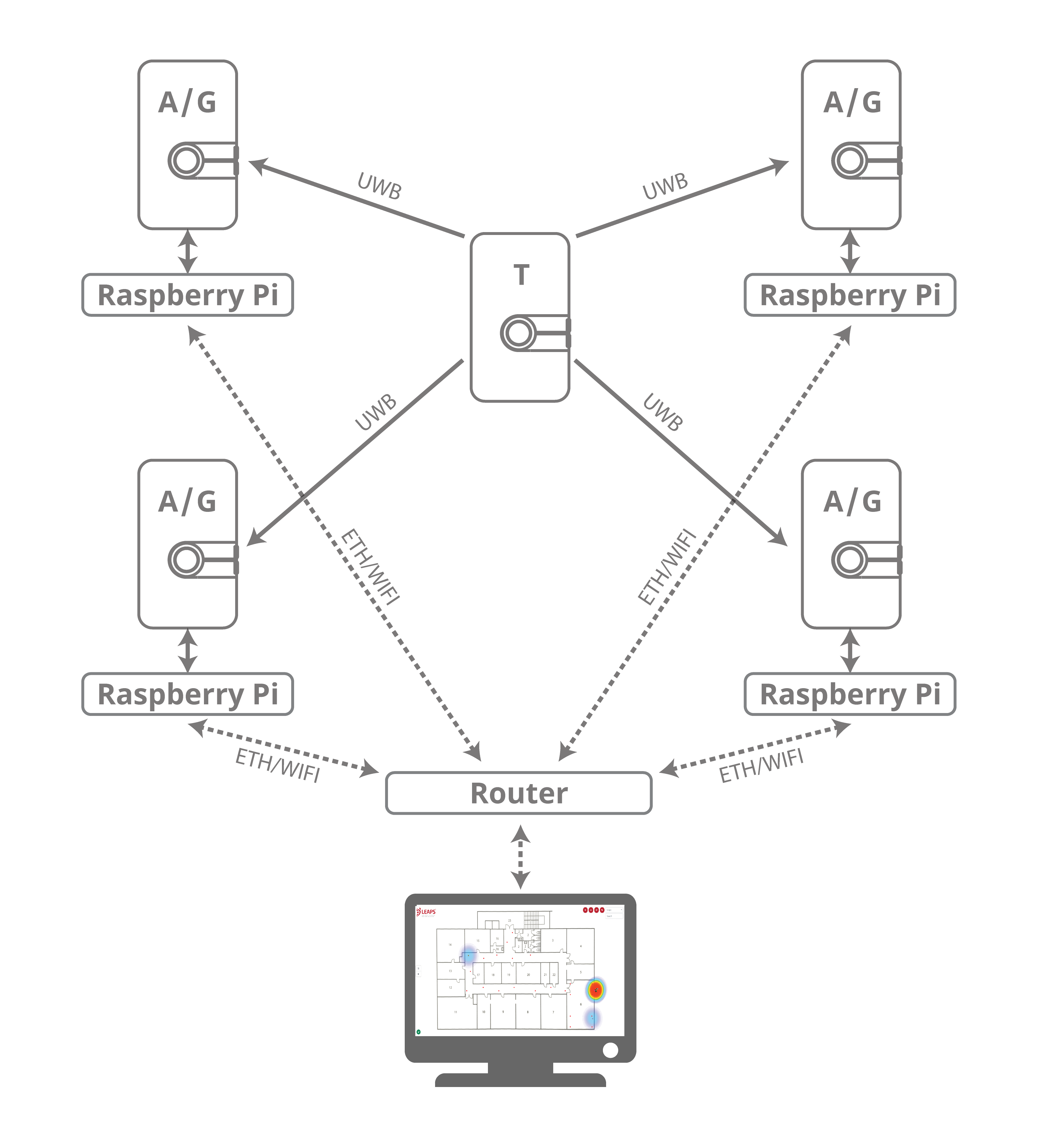
数据流:当标签闪烁时,锚点会接收闪烁,并通过 Leaps Gateway向 Leaps Server发送闪烁的 TX/RX 时间戳。 Leaps Server使用从主播收集的时间戳来计算标签的位置,并将位置发布到 MQTT 代理。
基础架构设置
设备配置
和上面一样,使用快速启动中的LM或高级中的Shell来配置设备。
设置 Raspberry Pis
使用 LEAPS-RPI-IMAGE 安装所有 Raspberry Pis。
每个对应的锚点连接到一个 Raspberry Pi,因此至少需要 4 个 Raspberry Pi。
该镜像包含了
LEAPS Gateway,LEAPS Server,LEAPS Center和Mosquitto MQTT Broker的设置和配置。
连接Raspberry Pis
将所有 Raspberry Pis 连接到路由器,确保它们在同一个局域网内。
LEAPS Server设置
选择任何一台 Raspberry Pi 来运行
LEAPS Server,并检查其 IP 地址. 要获取 IP 地址,请使用 ifconfig 命令。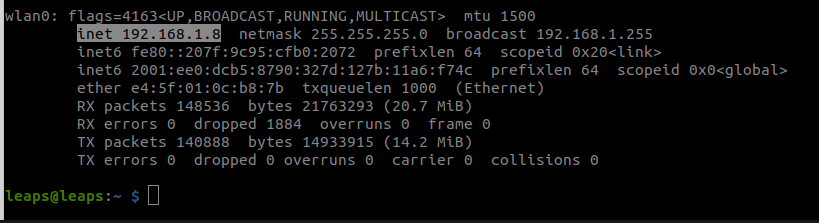
更新配置
使用所选 Raspberry Pi 的 IP 地址,为所有 Raspberry Pi 上的所有 LEAPS Gateway更新
/etc/usr/share/LEAPS-DOCKER-LINUX/leaps-gateway-hub/data/leaps-gateway.conf中的leaps-server-host配置。
例如
leaps-server-host = 192.168.1.8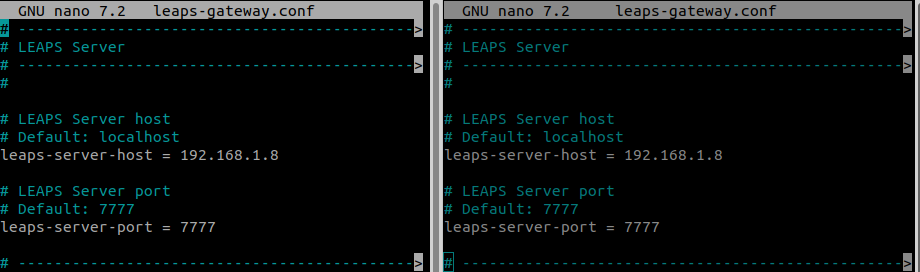
保存配置,并使用以下命令重启
LEAPS Gateway:sudo docker restart leaps_gateway
然后,用以下命令重启
LEAPS Server:sudo service leaps-server restart
监控系统
网关准备就绪后,使用
例如
mosquitto_sub -h 192.168.1.8 -p 1883 -t '#' -v
配置Leaps Center
例如:打开网络浏览器并导航到
192.168.1.8/2这可以直接在 Raspberry Pi 上访问,或者在连接到由 Raspberry Pi 以
Leaps1234密码广播的 LEAPS-AP 网络的 PC 上访问。如果在局域网中,你也可以使用另一台电脑的网页浏览器来访问 Raspberry Pi 的 IP 地址。
网络配置
在
LEAPS Center中,配置网络设置,以匹配所连接的网关板的网络 ID。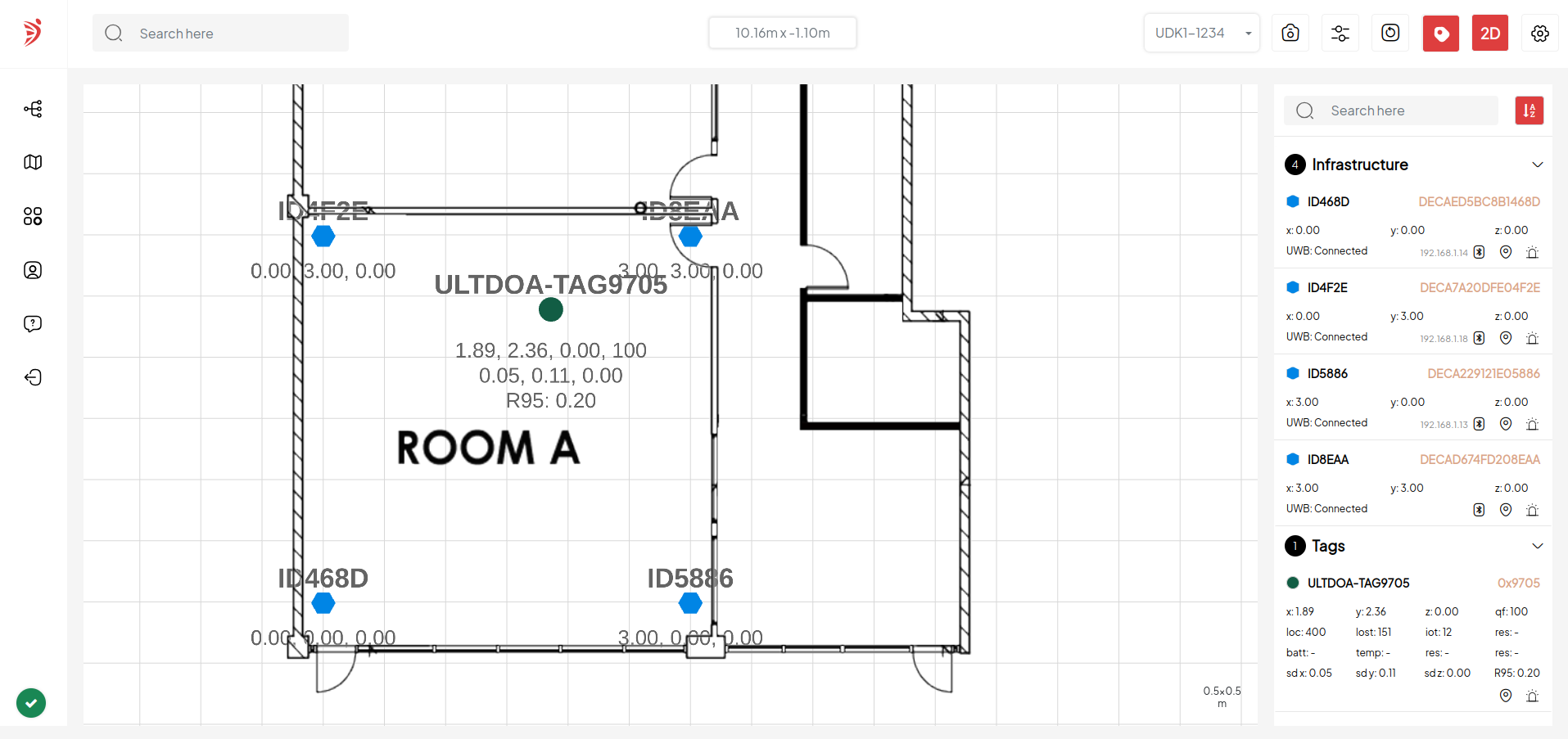
现在系统已经成功设置并配置好了。请尽情使用!
注解
请参考软件基础架构,进一步探索此演示的强大功能. 我们的支持包括 LEAPS Docker, LEAPS VMWare 和 LEAPS Raspberry Pi。
如果您对我们的产品有任何意见或问题,请访问我们的 LEAPS 论坛。
有关已知限制和问题列表的详情,请参阅 发布 部分。