无基础设施的邻近性演示
准备设置
LEAPS 管理器 应用程序已安装.
至少两个 LC14 或 LC13 设备.
用于为设备供电的电池或USB-C电缆.
可选:电脑上安装的Putty,Teraterm, minicom或你最喜欢的终端应用程序
设置时间: 少于 2 分钟
概览
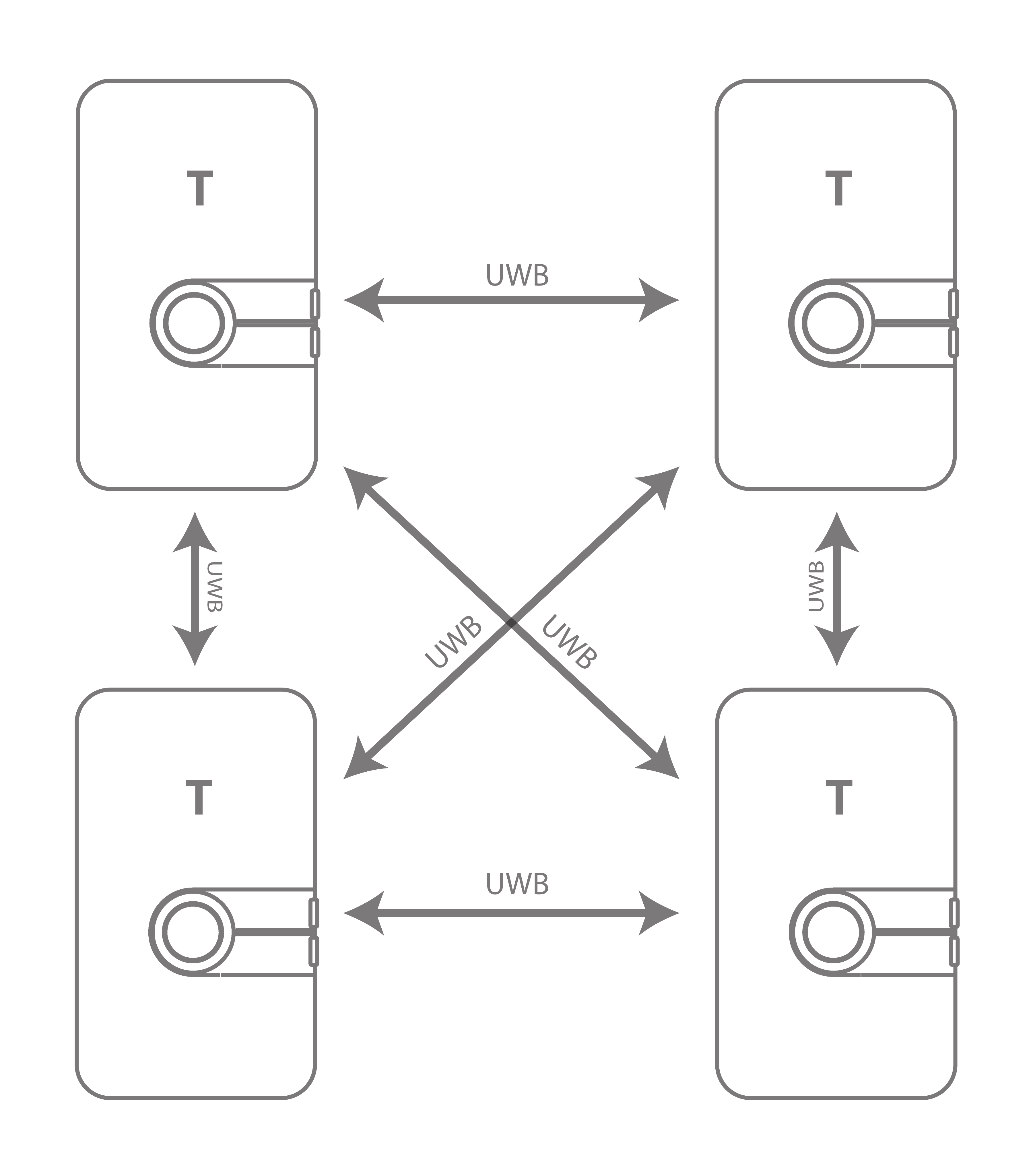
此演示基于 双向测距 (TWR) 测量技术,展示了无基础设施的节点间近距离检测. 当节点非常接近时,每个节点都会触发警报. 警报使用 LED, 触觉马达或蜂鸣器,阈值可配置.
典型应用:避免碰撞, 社会距离, 蜂群协调.
设置说明
启动 ON 设备.
这些设备将作为独立标签运行,使用蓝牙发现周围的设备,并使用 UWB 测量与被发现设备的距离.
使用 LEAPS 管理器 中的演示选择器进行配置:
2.1. 打开LEAPS管理器,从主页面选择 演示选择器.
2.2. 选择 无基础架构的近似性.
2.3. 通过蓝牙发现的设备列表会出现在列表中. 如果需要,向下滑动以更新列表.
2.4. 选择用于演示的设备. 上方的 nodes 表示演示所需的设备数量.
2.5. 按下 SAVE 键,将设备配置为 LEAPS RTLS 模式, Tag-Mesh 网络配置文件.
2.6. 请目测设备启动时 RED LED 是否闪烁.
设备配置为 无基础设施的邻近性演示.
默认情况下,当设备之间的距离在 2.5 米以内时,警报就会启动(由红色 LED 和蜂鸣器指示). 警报的强度会随着设备的靠近而增加.
初始时,设备会发出低强度的蜂鸣声,并闪烁红色 LED 灯. 你可以使用上下键来调整哔哔声的音量,振动也会启用.
在下面的演示中,设备有两个接近阈值:第一个阈值设置在 0.2 米,第二个设置在 0.5 米.
请参阅 LEAPS 管理器,了解如何使用应用程序来配置和可视化节点和网络的更多细节.
高级设置
准备好进行高级设置!我们将利用终端的强大功能,帮助你像专业人士一样配置你的设备. 只需按照以下步骤,你就能完成所有设置.
使用 USB-C 数据线将设备的 USB-C Data Port 1 或 USB-C Data Port 2 连接到 PC.
使用你想要的终端应用程序,如 Putty, Teraterm, Minicom 或你喜欢的终端应用程序,连接到串行端口. 我们需要将波特率设置为 115200.
例如在 Ubuntu (Linux) 上使用 Minicom:
minicom -b 115200 -D /dev/ttyACM0
在 shell 控制台按下 双输入 访问命令行控制系统
例如,在 Ubuntu (Linux) 上打开 /dev/ttyACM0 并按下 双击回车键:
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps>
按以下步骤配置每个设备:
将设备重置为默认设置,运行 frst 命令. (可选)
$ leaps> frst frst ok
(监控并等待设备重置成功. 然后按双击回车键,进入命令行控制系统.)
使用 nps 4 命令为每个设备配置 配置文件4(支持标签网状近程).
$ leaps> nps 4 nps: ok
使用 nis 命令来配置网络中的所有设备.
$ leaps> nis 0x1234 nis: ok
使用 nmt 命令更新标签模式.
$ leaps> nmt(然后监控并等待设备配置成功. 然后按下双回车键,再次进入命令行控制系统. )
使用 si 命令来验证模式, 配置文件和网络等配置.
leaps> si [000028.754 INF] release: LEAPS RTLS v0.15.0-ab84fb [000028.754 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000028.754 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto10 [000028.754 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=236 temp=5 [000028.755 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000028.755 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000028.758 INF] mode: tn (act,twr,np,le) [000028.774 INF] uwbmac: connected prof=4 (manual) [000028.774 INF] uwbmac: bh disconnected [000028.774 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=0 upd_rate_norm=1 upd_D [000028.802 INF] enc: off [000028.802 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: tn
panid=x1234
prof=4
请目测设备启动时 RED LED 是否闪烁.
注解
在这个例子中,我们将配置 2 个标签.
配置设备后,它会通过 BLE 扫描所有设备. 如果设备在允许的距离内,它会自动重新激活 UWB 并测量彼此的距离.
使用 ln 命令来显示所有设备. 这可以用于所有 UDK1 设备.
$ leaps> ln [000005.713 INF] TN: cnt=2 size=100 [000005.713 INF] 0) id=468D dist=0.40,xDD [000005.713 INF] 1) id=4F2E dist=0.00,xBD [000005.713 INF]$ leaps> ln [000033.319 INF] TN: cnt=2 size=100 [000033.319 INF] 0) id=468D dist=0.00,x00 [000033.320 INF] 1) id=4F2E dist=0.44,x66 [000033.320 INF]
在 无基础设施的邻近性演示 中.
默认情况下,当设备之间的距离在 2.5 米以内时,警报就会启动(由红色 LED 和蜂鸣器指示). 警报的强度会随着设备的靠近而增加.
初始时,设备会发出低强度的蜂鸣声,并闪烁红色 LED 灯. 你可以使用上下键来调整哔哔声的音量,振动也会启用.
用户可以通过两个命令来查看和配置这个距离: dacg 命令和 dacs 命令.
例如,要查看和配置2个阈值0.2米和0.5米. 运行以下命令:
查看:
$ leaps> dacg dacg: thold_1=200 thold_2=500 mincon=2 minnocon=2 opt=7
配置:
$ leaps> dacs 200 500 2 2 7 dacs: ok在下面的 GIF 图片中,设备配置的阈值1为0.2米,阈值2为0.5米.
配置完成后,你可以打开标签的shell控制台,使用 les 命令查看标签的位置.
$ leaps> les leaps> POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.54 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.57 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.58 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.59 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.51 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.47 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.43 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.40 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.35 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.32 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.31 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.29 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.27 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.22 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.19 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.16 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.14 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.12 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.09 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.08 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.05 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.09 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.11 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.13 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.15 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.17 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.19 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.21 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.23 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.42 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.51 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.56 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.60 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.62 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.64 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.67 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.69 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.71 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.73 POS[NaN,NaN,Nan,0] 4F2E[0.00,0.00,0.00,100]=0.73
现在系统已经成功设置和配置. 请尽情使用!
小心
与配置文件 4 有关
当设备处于锚点或启动器模式时,用户不得切换到配置文件4.
配置的更新速率值应限制在<1; 10>以内.