ファームウェアのプログラミング/アップグレード
本节提供有关如何更新固件的说明。我们支持多种方式,例如通过:red:MSD, WebUSB, Serial-COM, OpenOCD 或 SEGGER J-Link。
注釈
Stay connected during the update process and use the correct Device and Interface.
詳細については、以下から使用する方法を選択してください。
セットアップの準備
少なくとも 1 つのデバイス。
更新するバイナリ ファイル。
MSD 経由で更新する方法の詳しい手順
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 2 を PC に接続します。
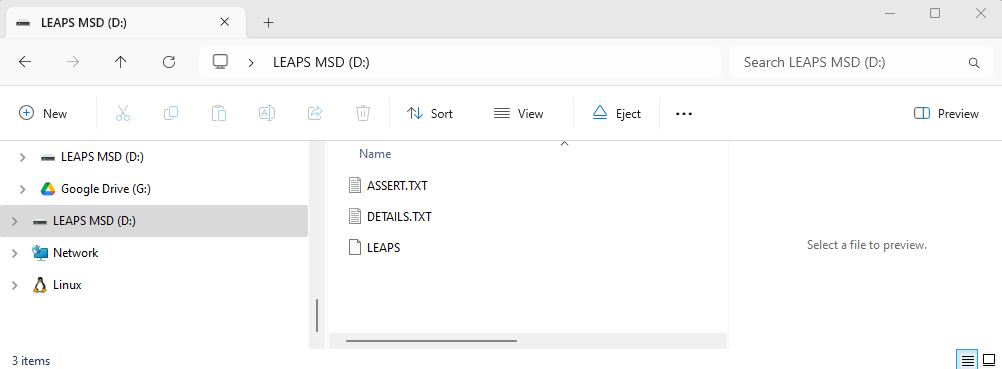
接続すると、LEAPS MSD ドライブが PC 上に表示されます。 LEAPS MSD ドライブを開きます。
たとえば、Windows の場合:
LEAPS-UWBS-Firmware-v1.0.0.zip ファイルを PC にダウンロードします。 WinZip や 7-Zip などのプログラムを使用して、ダウンロードしたファイルの内容を抽出します。
LEAPS-UWBS-Firmware-v1.0.0/LEAPS-UWBS-Firmware-OpenOCD/udk1-leaps-uwbs-v1.0.0.binでバイナリ ファイルを見つけます。このファイルを LEAPS MSD ドライブにコピーします。
たとえば、Windows の場合:
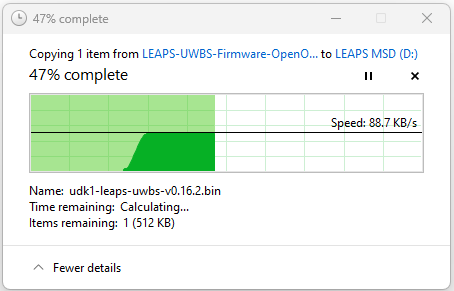
コピーが成功するまで、コピーとフラッシュのプロセスを待ちます。ボードはプロセスの一部として自動的にリセットされ、RGB LED が点灯し、ハードウェアからビープ音が鳴り、更新が成功したことが示されます。
デバイスはファームウェアを正常に更新しました。最新の機能と改良点をお楽しみください。
セットアップの準備
少なくとも 1 つのデバイス。
更新するバイナリ ファイル。
** WebUSB 経由でアップデートする方法をステップバイステップで説明します**
Node.js をダウンロードしてインストールします。
请访问 Node.js 官方网站 https://nodejs.org/en/download。
下载推荐的 Node.js 版本。
公式 Node.js Web サイト (https://nodejs.org/en/download) にアクセスします。
依存関係をインストールします。
コンピューターでお好きなターミナル・アプリケーションを開いてください。
Linux または macOS では、ターミナル アプリケーションのように。
Windows では、Powershell のように。
webusb 依存関係をインストールするには、次のコマンドを実行します。
npm install webusb次に、次のコマンドを実行して USB 依存関係をインストールします。
npm install usb最後に、次のコマンドを使用して、node-hid 依存関係をインストールします。
npm install node-hid
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 2 を PC に接続します。
パッケージをダウンロードして PC に解凍します。WinZip や 7-Zip などのプログラムを使用して、ダウンロードした LEAPS-UWBS-Firmware-v1.0.0.zip ファイルを解凍します。
ウェブサイト DAPLink Flash を開きます。
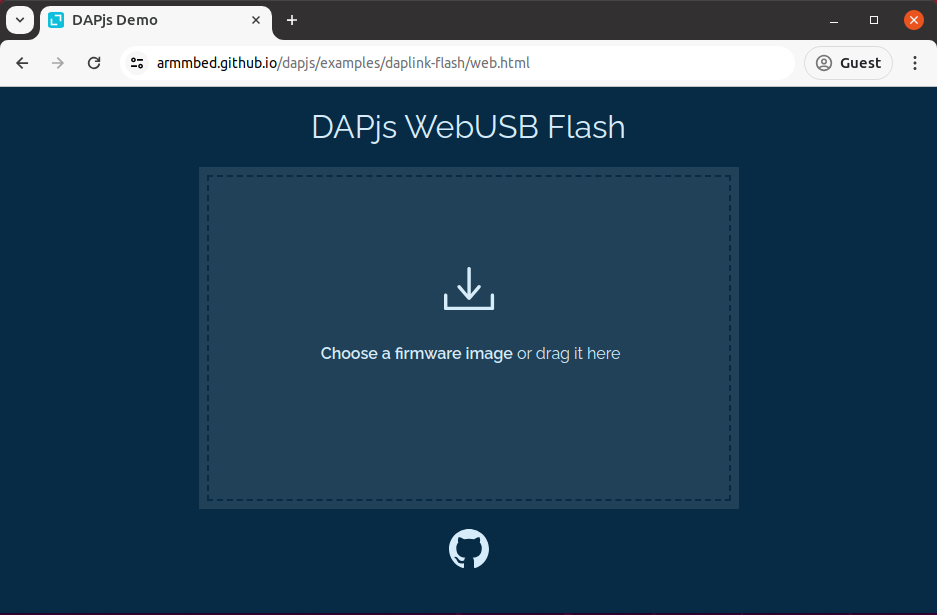
ファームウェア イメージを選択 をクリックし、LEAPS-UWBS-Firmware-v1.0.0/LEAPS-UWBS-Firmware-OpenOCD/udk1-leaps-uwbs-v1.0.0.hex` でバイナリ ファイルを選択します。
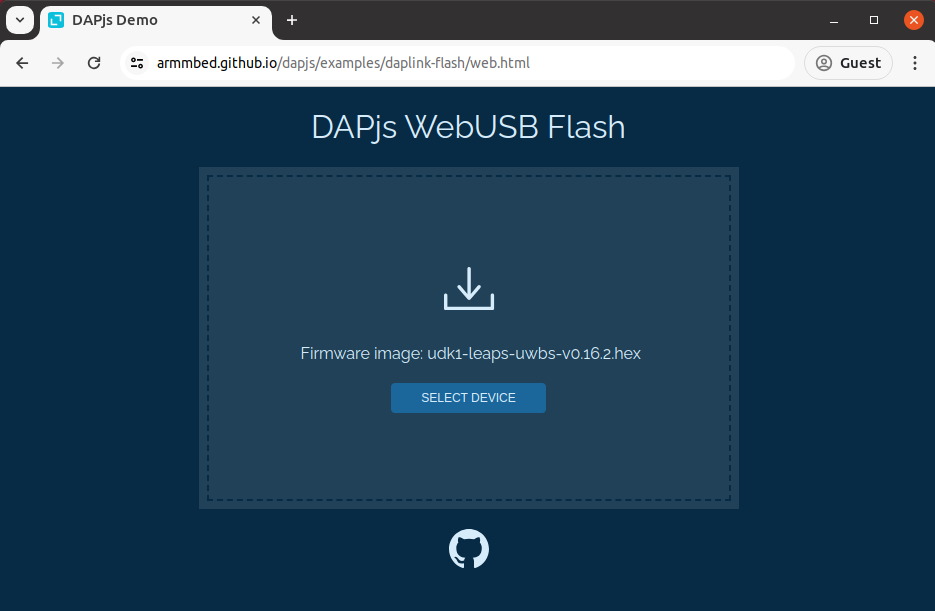
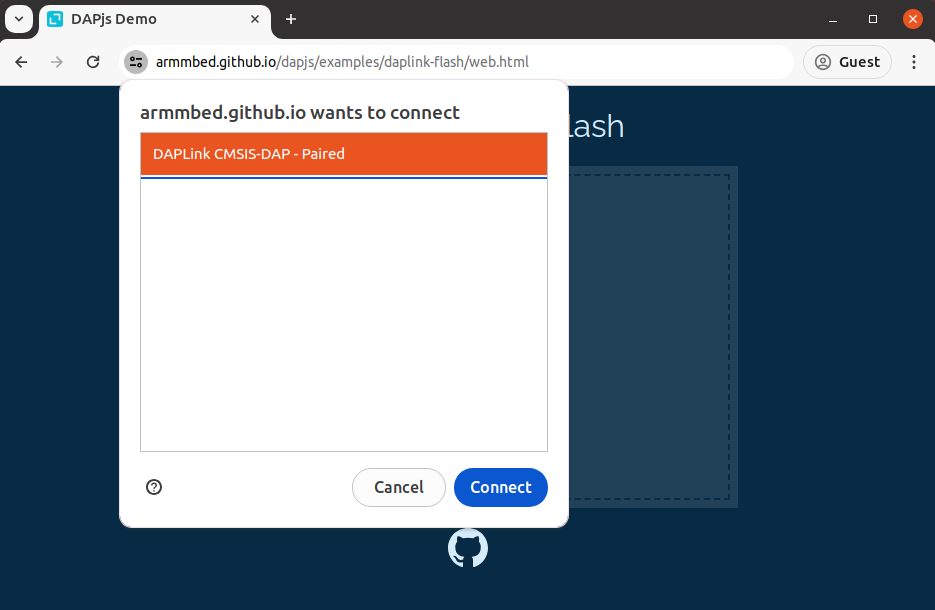
SELECT DEVICE ボタンをクリックして、PC に接続されている DAPLink CMSIS-DAP ポートを選択します。
ファームウェア イメージを選択すると、バイナリ ファイルのフラッシュ プロセスが開始されます。プロセス全体を通じてハードウェアが接続されていることを確認してください。
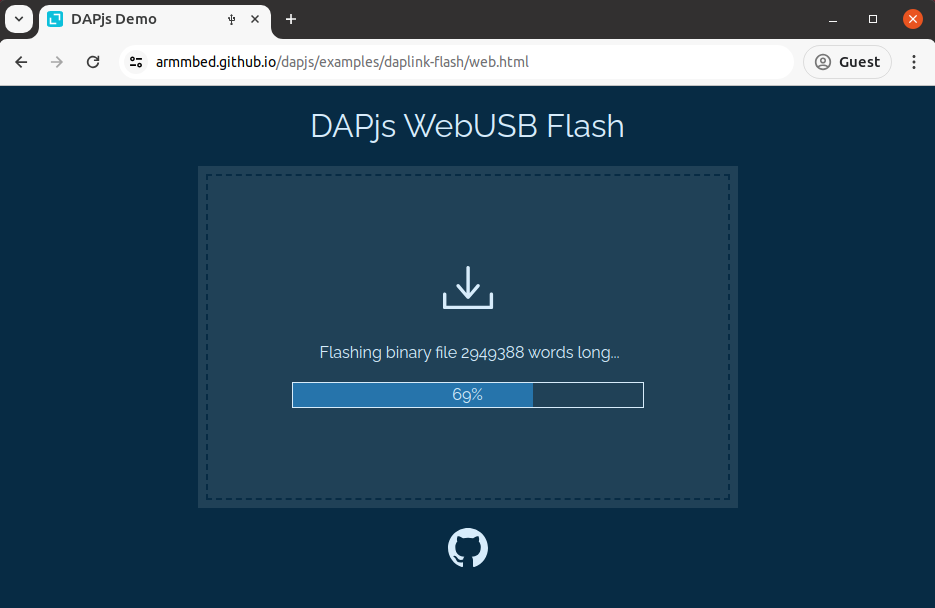
注釈
予期しない問題が発生する可能性があります。ボードをコンピュータから取り外して、再度起動してください。
フラッシュが完了しました! の後。ボードはプロセスの一部として自動的にリセットされ、RGB LED が点灯し、ハードウェアからビープ音が鳴り、更新が成功したことが示されます。

デバイスはファームウェアを正常に更新しました。最新の機能と改良点をお楽しみください。
必要なもの:
少なくとも 1 つのデバイスが USB ポート経由で接続されています。
パッケージに含まれるスクリプトとファームウェアのバイナリ。
システムにインストールされている python3。
シリアル COM 経由で更新する方法に関する詳しい説明:
パッケージをダウンロードして PC に解凍します。WinZip や 7-Zip などのプログラムを使用して、ダウンロードした LEAPS-UWBS-Firmware-v1.0.0.zip ファイルを解凍します。
お気に入りのターミナル アプリケーションを開きます。
Linux または macOS では、ターミナル アプリケーションのように。
Windows では、Powershell のように。
抽出されたパッケージが含まれるフォルダーに移動します。
Python の依存関係をインストールします。
$ pip install pyserial libusb tqdm
更新に 2 つのポートのうち 1 つを使用することを選択できます。
USB-C Data Port 1 を使用している場合は、ELDR バイナリと MAIN バイナリを個別に更新できます。逆に、 USB-C Data Port 2 を使用すると、複数のデバイスを同時に連続的に更新できます。
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 1 に接続します。
次のコマンドを実行して、ELDR および MAIN バイナリを更新します。
~/LEAPS-UWBS-Firmware-Serial-COM$ sudo python3 ./udk1-leaps-uwbs-serial-com.py --main ./udk1-leaps-uwbs-fira-v0.15.0-rc8.bin --eldr ./udk1-leaps-uwbs-eldr-v0.15.0-rc8.bin 03:11:55 Device 01/02 (SerialNumber=3DB15A2CCB8053C8): Reset 03:11:55 Device 02/02 (SerialNumber=904AD29FD29D2452): Reset 15:12:15 Device 01/02 (SerialNumber=904AD29FD29D2452): Uploading MAIN: 100%|████████████████████████████| 716192/716192 [00:16<00:00, 44623.94it/s] 15:12:15 Device 02/02 (SerialNumber=3DB15A2CCB8053C8): Uploading MAIN: 100%|████████████████████████████| 716192/716192 [00:16<00:00, 44630.31it/s] 15:12:37 Device 01/02 (SerialNumber=904AD29FD29D2452): Uploading ELDR: 100%|████████████████████████████| 235748/235748 [00:05<00:00, 42419.44it/s] 15:12:37 Device 02/02 (SerialNumber=3DB15A2CCB8053C8): Uploading ELDR: 100%|████████████████████████████| 235748/235748 [00:05<00:00, 42498.01it/s] 03:12:43 Resetting devices
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 2 に接続します。次のコマンドを実行して、ELDR または MAIN バイナリを更新します。
注釈
USB-C データ ポート 2 経由でファームウェアを更新できるようにするには、udev ルールをインストールする必要がある場合があります。 Debian 風のディストリビューションについては、 udev ルールのインストール を参照してください。
~/LEAPS-UWBS-Firmware-Serial-COM$ python3 ./udk1-leaps-uwbs-serial-com.py -d /dev/ttyACM0 --eldr ./udk1-leaps-uwbs-eldr-v0.15.0-rc8.bin 02:54:30 Resetting device 02:54:33 Uploading file /home/leaps/LEAPS-UWBS-Firmware-v0.15.0/LEAPS-UWBS-Firmware-Serial-COM/udk1-leaps-uwbs-eldr-v0.15.0-rc8.bin (235748 bytes) 100%|████████████████████████████| 235748/235748 [00:28<00:00, 8129.43it/s] 02:55:07 Ok (upload time = 34.70 seconds) 02:55:10 Resetting device ~/LEAPS-UWBS-Firmware-Serial-COM$ python3 ./udk1-leaps-uwbs-serial-com.py -d /dev/ttyACM0 --main ./udk1-leaps-uwbs-fira-v0.15.0-rc8.bin 02:56:25 Resetting device 02:56:28 Uploading file /home/leaps/LEAPS-UWBS-Firmware-v0.15.0/LEAPS-UWBS-Firmware-Serial-COM/udk1-leaps-uwbs-fira-v0.15.0-rc8.bin (716192 bytes) 100%|████████████████████████████| 716192/716192 [01:27<00:00, 8175.81it/s] 02:58:11 Ok (upload time = 102.74 seconds) 02:58:14 Resetting device
更新が完了するまで待ちます。
更新が完了すると、ボードはプロセスの一部として自動的にリセットされます。
デバイスはファームウェアを正常に更新しました。最新の機能と改良点をお楽しみください。
セットアップの準備
少なくとも 1 つのデバイス。
パッケージには、アップデート用のスクリプトとバイナリが含まれています。
OpenOCD がインストールされました。
OpenOCD (Open On-Chip Debugger) 経由で更新する方法に関するステップバイステップの手順:
OpenOCD デバッガーをインストールしています。
Windows に OpenOCD をインストールしています。
Windows 用のバイナリ zip ファイルをダウンロードします。
C:\xpack-openocd-0.11.0-1フォルダーに解凍します。Add the path:
C:\xpack-openocd-0.11.0-1\binto your Windows User Path environment variable.
Linux または Mac OS に OpenOCD をインストールします。
Linux 用バイナリ tarball をダウンロードします。
tarball を解凍してローカルにインストールします。
mkdir -p ~/.local/xPacks/openocd cd ~/.local/xPacks/openocd tar -zxvf ~/Downloads/xpack-openocd-0.11.0-1-linux-arm.tar.gz (with PC’s AMD core, using … linux-x64.tar.gz with PC’s Intel core) .... sudo chmod -R -w xpack-openocd-0.11.0-1/ ~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/openocd --version export PATH="~/.local/xPacks/openocd/xpack-openocd-0.11.0-1/bin/:$PATH" cd ~ source .bashrc
OpenOCD のバージョンを確認します。
openocd --version xPack OpenOCD, x86_64 Open On-Chip Debugger 0.11.0-00155-ge392e485e (2021-03-15-16:43) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html
パッケージをダウンロードして PC に解凍します。WinZip や 7-Zip などのプログラムを使用して、ダウンロードした LEAPS-UWBS-Firmware-v1.0.0.zip ファイルを解凍します。
お気に入りのターミナル アプリケーションを開きます。
Linux または macOS では、ターミナル アプリケーションのように。
Windows では、Powershell のように。
抽出されたパッケージが含まれるフォルダーに移動します。
cd から /path/to/LEAPS-UWBS-Firmware-OpenOCD
USB-C データ ケーブルを使用して、デバイスの USB-C データ ポート 2 を PC に接続します。
スクリプトを実行して、ファームウェアを自動的に更新します。
Linux または macOS では、reflash-leaps-rtls-2ab.sh コマンドを使用します。
Windows では、reflash-leaps-rtls-2ab.bat コマンドを使用します。
./reflash-leaps-rtls-2ab.sh xPack OpenOCD, x86_64 Open On-Chip Debugger 0.11.0-00155-ge392e485e (2021-03-15-16:43) Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html DEPRECATED! use 'adapter speed' not 'adapter_khz' set_test_mode Info : Using CMSIS-DAPv2 interface with VID:PID=0x0d28:0x0204, serial=01100E003602002e003f4146570120313238 Info : CMSIS-DAP: SWD Supported Info : CMSIS-DAP: FW Version = 2.1.0 Info : CMSIS-DAP: Serial# = 01100E003602002e003f4146570120313238 Info : CMSIS-DAP: Interface Initialised (SWD) Info : SWCLK/TCK = 1 SWDIO/TMS = 1 TDI = 0 TDO = 0 nTRST = 0 nRESET = 1 Info : CMSIS-DAP: Interface ready Info : High speed (adapter speed 10000) may be limited by adapter firmware. Info : clock speed 10000 kHz Info : SWD DPIDR 0x2ba01477 Info : nrf52.cpu: hardware has 6 breakpoints, 4 watchpoints Info : starting gdb server for nrf52.cpu on 3333 Info : Listening on port 3333 for gdb connections target halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0x000031ec msp: 0x20003488 target halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0xfffffffe msp: 0xfffffffc Info : nRF52840-CKAA(build code: D0) 1024kB Flash, 256kB RAM auto erase enabled wrote 1048576 bytes from file leaps-rtls-all-2ab-v0.14-rc25.hex in 38.776192s (26.408 KiB/s)
更新が完了すると、デバイスは更新の成功を示すビープ音を鳴らします。ボードはプロセスの一部として自動的にリセットされます。
デバイスはファームウェアを正常に更新しました。最新の機能と改良点をお楽しみください。
トラブルシューティング
"エラー: コアを制御する MEM-AP が見つかりませんでした" の場合。
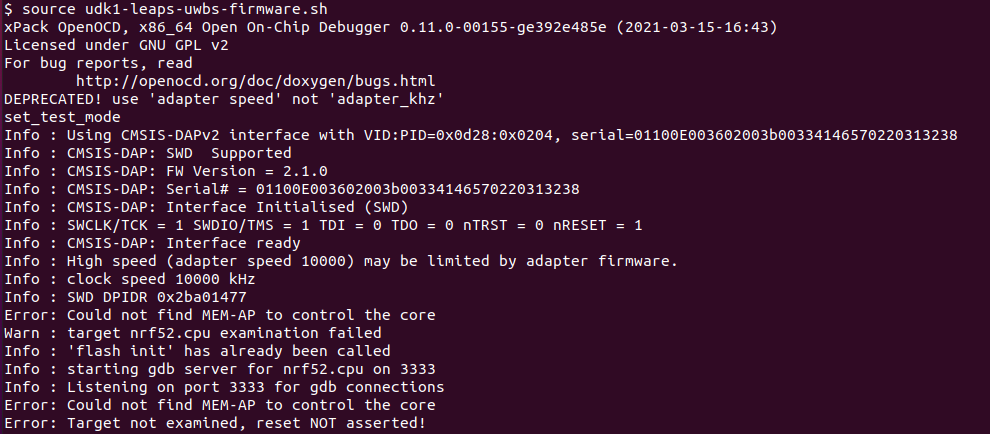
次のコマンドを実行して復元してください。
openocd -f ./openocd-swd-nrf52.cfg -c "init;nrf52833_workaround;exit_debug_mode;shutdown;sleep 250"
次に、./reflash-leaps-rtls-2ab.sh の実行を続けます。
セットアップの準備
少なくともデバイスがあります。
更新するバイナリファイル。(.hex または .bin)
SEGGER J-Link <https://www.segger.com/downloads/jlink/#J-LinkSoftwareAndDocumentationPack>`_ をインストールしました。
** SEGGER J-Linkを使ったアップデート方法のステップバイステップの説明**
SEGGER J-Linkをインストールします。
Windows用のダウンロードファイル
JLink_Windows_V766_x86_64.exeを探してください。
ファイルをダブルクリックしてインストールを開始します。
プロンプトが表示されたら、管理者パスワードを入力してください。
ライセンス条項を読み、同意してください。
デフォルトのインストール先フォルダは、通常
C:∕Program Files (x86)∕SEGGERJLinkにあります。デフォルトのUSBドライバを承認してください。
インストールが完了すると、システムフォルダにフォルダとドライバファイル一式がインストールされます。新しくインストールするたびに、これらのファイルは上書きされますのでご注意ください。
JLink_MacOSX_V766_x86_64.pkg`` という名前の macOS ダウンロードファイルを探してください。
ファイルをダブルクリックしてインストールを開始します。
ライセンス条項を読み、同意してください。
プロンプトが表示されたら、管理者パスワードを入力してください。このパスワードはアプリケーションフォルダに書き込むのに必要です。
インストール後、次の場所にフォルダができます:
/Applications/SEGGER/JLink_V766/. バージョンごとにフォルダが異なることを覚えておいてください。このフォルダにはアプリケーションに関連するすべての実行ファイルとライブラリが保存されます。GNU/Linux用のSEGGERダウンロードサイトにアクセスし、目的のパッケージを見つけてください。32/64ビット版から選択してください。
.tgzファイルをダウンロードし、コンピュータに保存してください。
ターミナルウィンドウを開きます。
例えば、Ubuntu (Linux) で64ビットの .tgz ファイルをインストールするには、以下のコマンドを使ってください:
mkdir -p ~/opt/SEGGER cd ~/opt/SEGGER tar xf ~/Downloads/JLink_Linux_V766_x86_64.tgz chmod a-w ~/opt/SEGGER/JLink_Linux_V766_x86_64 ls -l ~/opt/SEGGER/JLink_Linux_V766_x86_64上記のコマンドを実行した後:
~/opt/SEGGER にフォルダが作成されます。
ダウンロードした .tgz ファイルの内容が ~/opt/SEGGER フォルダに展開されます。
JLink_Linux_V766_x86_64` ファイルのパーミッションが変更されます。
~/opt/SEGGER/JLink_Linux_V766_x86_64 フォルダの内容をチェックすることでインストールを確認できます。
新規インストール時にシステムフォルダ内の既存のファイルを上書きすることに注意してください。
SEGGER J-Linkを開き、バイナリファイルをフラッシュしてください。
最新の J-Link ソフトウェア&ドキュメントパックがインストールされていることを確認してください。
J-LinkをPCに接続してください。
ターゲットシステムをJ-Linkに接続
J-Flash Liteの起動
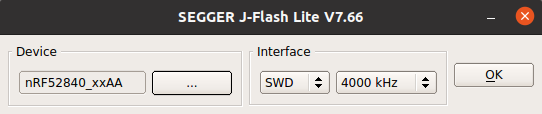
デバイス、デバッグインターフェイス、通信速度の選択
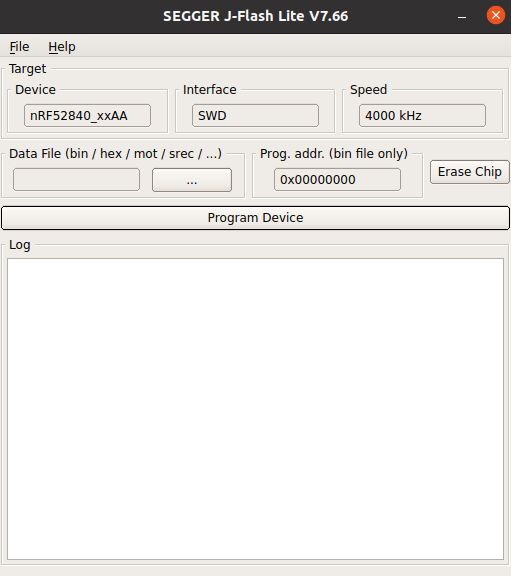
ファイルを選択し、[デバイスをプログラム]をクリックするか、[チップを消去]をクリックします。
J-Flash Liteは要求された操作を実行します
最新の J-Link ソフトウェア&ドキュメントパックがインストールされていることを確認してください。
J-LinkをPCに接続します。
ターゲットシステムをJ-Linkに接続
J-Link Commanderを起動してください。
以下のコマンドを入力してください:
J-Link> device <devicename> // 既知のデバイスのリストについては、ここを参照してください。
J-Link> r
J-Link> h
J-Link> loadbin <PathToBinFile>, <programmingaddress>
J-Link Commander はフラッシュダウンロードを実行し、成功したら時間統計を出力します。
更新が完了すると、ボードは自動的にリセットされます。
ファームウェアを確認し、成功を確認してください
お好きなターミナル・アプリケーションを開いてください、
GNU/LinuxまたはmacOSでは Terminal アプリケーションのようになります。
Windowsでは Powershell アプリケーションのようなものです。
Windows,类似中:red:Powershell 应用序程:
minicom -b 115200 -D /dev/ttyACM0