下行 TDoA RTLS 演示
准备设置
LEAPS Manager 应用程序已安装。
至少五个LC14设备。
为设备供电的电池或USB-C电缆。
推荐:带相机固定装置的夹子或三脚架,用于固定主播设备
在电脑上安装 Putty, Teraterm, minicom 或你喜欢的终端应用程序
设置时间: 少于 5 分钟
概览
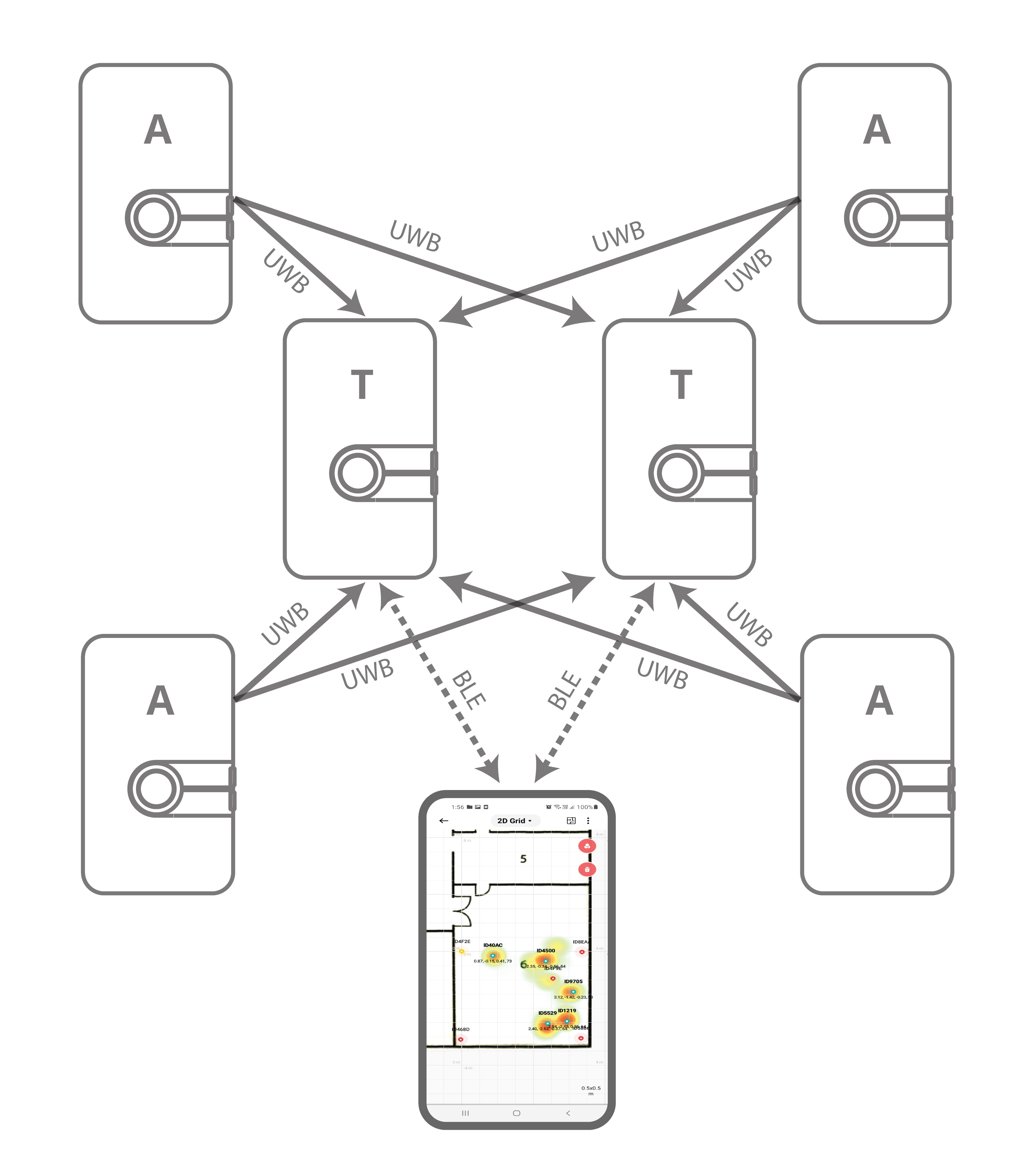
此设置演示了使用 下行链路到达时间差(DL-TDoA) 技术,在完全保密的只接收模式下,对无限量的标签进行实时导航,并演示了带有标签位置导航功能的 LEAPS Manager 应用程序。
典型应用:带有地图的室内导航, 自主机器人和车辆导航, 通过其他通信渠道发送位置数据的资产追踪。
设置说明
启动 ON 设备。
静态安装的设备将作为锚点,为标签提供位置信息。
移动设备的功能将与导航模式下配置的标签一样,只有接收模式,没有传输模式 (类似 GNSS 模式)
标签的数量没有限制。
使用 LEAPS Manager 中的演示选择器进行配置:
2.1. 打开 LEAPS Manager,从主页面选择 Demo Selector
2.2. 选择 Downlink TDoA RTLS。
2.3. 通过Bluetooth发现的设备列表将出现在列表中.如有需要,向下滑动以更新列表。
2.4. 选择用于演示的设备.顶部的 anchors 和 tags 显示演示所需的设备数量。
2.5. 按 SAVE 键,将设备配置为 LEAPS RTLS 模式,联网 配置文件2(支持 TWR+UL / DL-Data, DL-TDoA)。
2.6。 将出现一个弹出窗口“锚点配置”,提供配置锚点位置的选项。 根据需要选择 手动定位, 自动定位 或 保持当前位置,然后按下 确定。
2.7. 请目测设备启动时 RED LED 是否闪烁。

当设备配置成功后,LEAPS演示网络窗口会出现已配置节点的列表。
推荐使用 使用警报功能来识别设备,并将其移动到正确的物理位置
打开位于顶部下拉菜单的 Grid 或点击位置图标,以查看设备及其位置。
配置为 配置文件2 (支持 TWR+UL / DL-Data, DL-TDoA) 的 LEAPS Manager 处于自动状态. 因此,我们可以在地图上看到标签的坐标。
(在 GIF 图像中,锚点是配置好的,并相隔 1 米放置)
请参阅 LEAPS Manager,了解如何使用应用程序来配置和可视化节点和网络。
高级设置
准备好进行高级设置!我们将利用终端的强大功能,帮助你像专业人士一样配置你的设备。 只需按照以下步骤,你就能完成所有设置。
使用 USB-C 数据线将设备的 USB-C Data Port 1 或 USB-C Data Port 2 连接到 PC。
使用你想要的终端应用程序,如 Putty, Teraterm, Minicom 或你最喜欢的终端应用程序,连接到串行端口. 我们需要将波特率设置为 115200。
例如在, Ubuntu (Linux) 上使用 Minicom:
minicom -b 115200 -D /dev/ttyACM0
在 shell 控制台按下 双输入 访问命令行控制系统
例如,在 Ubuntu (Linux) 上打开 /dev/ttyACM0,然后按 双击回车键 :
minicom -b 115200 -D /dev/ttyACM0 Welcome to minicom 2.7.1 OPTIONS: I18n Compiled on Dec 23 2019, 02:06:26. Port /dev/ttyACM0, 16:02:57 Press CTRL-A Z for help on special keys Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps>
为每个设备进行配置,请执行以下步骤:
运行 frst 命令将设备重置为默认设置. (可选)
$ leaps> frst frst ok
(监控并等待设备重置成功. 然后按 double enter 键,进入命令行控制系统.)
使用 nps 2 命令为每个设备配置 配置文件 2 (支持 TWR+UL / DL-Data, DL-TDoA)。
$ leaps> nps 2 nps: ok
使用 nis 命令来配置网络中的所有设备。
$ leaps> nis 0x1234 nis: ok
此时,需要重置设备以更新配置.使用 reset 命令重置设备。
$ leaps> reset reset ok
注解
在本例中,我们将配置一个 锚点,并启用启动器, 3锚点 和 一标签。
为每个锚点和标签配置模式。
要配置 使用启用启动器锚定,请使用 nmi 命令配置设备。
$ leaps> nmi然后,设备将重置,要再次访问命令行控制系统,请按双回车键。
要配置 3 anchors,请使用 nma 命令将 3 台设备配置为锚点模式,但不要启用启动器。
$ leaps> nma然后,设备将重置,要再次访问命令行控制系统,请按双回车键。
要配置 a tag,使用 nmt 命令将一个设备配置为标签模式。
$ leaps> nmt然后,设备将重置,要再次访问命令行控制系统,请按双回车键。
为其中一个锚点配置时钟基准。
至少配置了一个锚点。
要配置 带有启用时钟参考的锚点,请使用 acs cr 命令配置设备。
$ leaps> acs cr 1此时,需要重置设备以更新配置.使用 reset 命令重置设备。
$ leaps> reset reset ok
配置每个锚点的实际位置。
使用 pg 命令获取位置,使用 ps 命令设置每个锚点的位置。
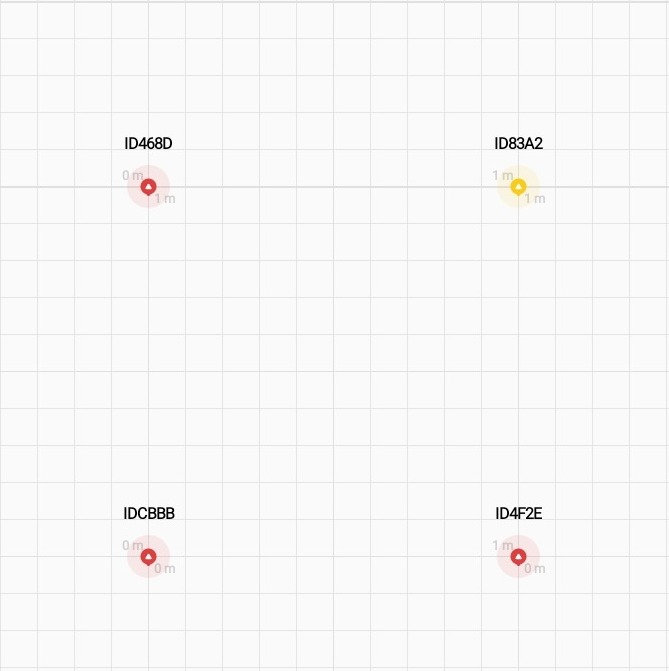
在这个例子中,我们将配置 4 个锚点,它们之间相距 1 米,并排列成正方形:
leaps> ps 1000 1000 0 ps: ok leaps> pg pg: x:1000 y:1000 z:0 qf:100 leaps>leaps> ps 0 0 0 ps: ok leaps> pg pg: x:0 y:0 z:0 qf:100 leaps>leaps> ps 1000 0 0 ps: ok leaps> pg pg: x:1000 y:0 z:0 qf:100 leaps>leaps> ps 0 1000 0 ps: ok leaps> pg pg: x:0 y:1000 z:0 qf:100 leaps>
成功配置锚点后,将其移动到相距 1 米的正确物理位置。
此外,我们还可以使用 LEAPS Manager 来可视化设备及其位置。
每个标签的配置允许使用 DL-TDoA 技术进行测量。
使用 tcs mode 2 命令对标签进行配置。
$ leaps> tcs mode 2 tcs: ok
然后,需要重置设备以更新配置. 使用 reset 命令重置设备。
$ leaps> reset reset ok
默认 normal update rate 为 0.1s/ 10Hz,stationary update rate 为 5.0s/ 0.2Hz. 要提高速度,请使用 urs 命令。
例如,配置 正常更新率 为 0.1s/ 10Hz,而 固定更新率 为0.1s/ 10Hz. 运行以下命令:
$ leaps> urs 1 1 urs: ok
在步骤 5, 6, 7 和 8 中,可以使用 si 命令验证模式, 配置文件和网络配置是否正确。 (可选)
例如 4 锚点和一个标签:
mode: ani
panid=x1234
prof=2
cr=1leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> acs cr 1 nis: ok leaps> nmi Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000008.695 INF] release: LEAPS RTLS v0.15.0-ab84fb [000008.696 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000008.696 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000008.696 INF] uwb: tx_pwr=x34/xFAFAFAFA sts:shr:phr:data=27.7:27.7:27.7:27.7[dB] cpl=FCC/ETSI pgcnt=5 [000008.697 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=27 tx_delay=16438 rx_delay=16438 [000008.697 INF] uwb: panid=x1234 addr=xDECA0E27530083A2 [000008.700 INF] mode: ani (act,-) [000008.715 INF] uwbmac: disconnected prof=2 (manual) [000008.715 INF] uwbmac: bh disconnected [000008.716 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=1 uab=1 bh=auto bh_stat=off cr=1 upd_rate_stat=30 label=ID83A2 [000008.744 INF] enc: off [000008.744 INF] ble: addr=F8:64:22:75:6C:F7 leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> [000004.252 INF] uwbmac: connected leaps> si [000073.748 INF] release: LEAPS RTLS v0.15.0-ab84fb [000073.748 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000073.748 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000073.749 INF] uwb: tx_pwr=x34/xE6E6E6E6 sts:shr:phr:data=25.8:25.8:25.8:25.8[dB] cpl=FCC/ETSI pgcnt=25 [000073.749 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16438 rx_delay=16438 [000073.750 INF] uwb: panid=x1234 addr=xDECA9DD29FD0CBBB [000073.753 INF] mode: an (act,-) [000073.764 INF] uwbmac: connected prof=2 (manual) [000073.764 INF] uwbmac: bh disconnected [000073.764 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=IDCBBB [000073.796 INF] enc: off [000073.796 INF] ble: addr=E6:92:A3:6B:05:21 leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000031.142 INF] release: LEAPS RTLS v0.15.0-ab84fb [000031.142 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000031.143 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000031.143 INF] uwb: tx_pwr=x34/xEEEEEEEE sts:shr:phr:data=26.5:26.5:26.5:26.5[dB] cpl=FCC/ETS5 [000031.144 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16436 rx_delay=16436 [000031.144 INF] uwb: panid=x1234 addr=xDECA7A20DFE04F2E [000031.148 INF] mode: an (act,-) [000031.163 INF] uwbmac: connected prof=2 (manual) [000031.163 INF] uwbmac: bh disconnected [000031.163 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID4F2E [000031.190 INF] enc: off [000031.190 INF] ble: addr=C8:D9:F3:F1:7D:CE leaps>
mode: an
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nma Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000004.702 INF] release: LEAPS RTLS v0.15.0-ab84fb [000004.703 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000004.703 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000004.703 INF] uwb: tx_pwr=x34/xC6C6C6C6 sts:shr:phr:data=22.6:22.6:22.6:22.6[dB] cpl=FCC/ETSI pgcnt=2365 [000004.704 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=32 tx_delay=16431 rx_delay=16431 [000004.704 INF] uwb: panid=x1234 addr=xDECAED5BC8B1468D [000004.707 INF] mode: an (act,-) [000004.720 INF] uwbmac: connected prof=2 (manual) [000004.720 INF] uwbmac: bh disconnected [000004.720 INF] cfg: sync=0 fwup=1 ble=1 leds=1 init=0 uab=1 bh=auto bh_stat=off cr=0 upd_rate_stat=30 label=ID468D [000004.751 INF] enc: off [000004.752 INF] ble: addr=F3:D9:66:75:93:EB leaps>
mode: tn
panid=x1234
prof=2leaps> nps 2 nps: ok leaps> nis 0x1234 nis: ok leaps> nmt Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> tcs mode 2 tcs: ok leaps> urs 1 1 urs: ok leaps> reset reset ok Low Energy Accurate Positioning System FOR DEMO PURPOSE ONLY, NOT FOR SALE. Copyright : 2016-2023 LEAPS License : Please visit https://www.leapslabs.com/leaps-rtls-license Compiled : Jan 6 2024 09:38:07 (v0.15.0-ab84fb) Help : ? or help leaps> si [000006.325 INF] release: LEAPS RTLS v0.15.0-ab84fb [000006.325 INF] sys: main main_ver=x02000001 cfg_ver=x01040000 batt=none board=LC14_B [000006.326 INF] uwb: ch9 prf64 plen128 pac8 txcode9 rxcode9 baud6800 phrmodeext phrratestd sfdtypeieee4a sfdto129 stsmodeoff stslen64 pdoamodem0 [000006.326 INF] uwb: tx_pwr=x34/xB6B6B6B6 sts:shr:phr:data=21.1:21.1:21.1:21.1[dB] cpl=FCC/ETSI pgcnt=231 temp=25 [000006.327 INF] uwb: lna=1 pa=0 rf1=1 rf2=0 xtaltrim=43 tx_delay=16434 rx_delay=16434 [000006.327 INF] uwb: panid=x1234 addr=xDECA80CB2C558A11 [000006.330 INF] mode: tn (act,rtdoa,np,le) [000006.346 INF] uwbmac: connected prof=2 (manual) [000006.346 INF] uwbmac: bh disconnected [000006.347 INF] cfg: sync=0 fwup=1 ble=1 leds=1 le=1 lp=0 uab=1 stat_det=1 (sens=2) mode=2 upd_rate_norm=1 upd_rate_stat=1 label=ID8A11 [000006.374 INF] enc: off [000006.374 INF] ble: addr=E8:BB:0A:C9:93:4E leaps>
要查看范围内与设备本身相连的锚点列表,请使用 la (可选)
例如在锚点 1 上(启用启动器):
leaps> la [001330.813 INF] AN: cnt=4 seq=x03 [001330.813 INF] 0) id=83A2 seat=0 clk_lvl=0 seens=0 rssi=-127 cl=0000000F nbr=0000000F pos=1.00:1.00:0.00 [001330.814 INF] 1) id=4F2E seat=2 clk_lvl=1 seens=205 rssi=-55 cl=0000000F nbr=00000000 pos=1.00:0.00:0.00 [001330.814 INF] 2) id=468D seat=3 clk_lvl=1 seens=223 rssi=-55 cl=0000000F nbr=00000000 pos=0.00:1.00:0.00 [001330.814 INF] 3) id=CBBB seat=1 clk_lvl=1 seens=224 rssi=-55 cl=0000000F nbr=00000000 pos=0.00:0.00:0.00 [001330.815 INF] leaps>
现在系统已经成功设置和配置。 祝您使用愉快!
当低功耗Bluetooth (BLE) 和 LED 同时熄灭时,用户可能会错误地认为电路板无法运作。 在这种情况下,用户唯一的办法就是启动出厂重置(frst)命令。
这里有一些解决安装过程中相关问题的提示。
请检查版本. 我们建议您使用最新的官方版本。
当你不知道设备的当前状态时,请使用 LEAPS Manager 演示选择器中的 将设备重置为默认值 功能. 请参考下面的 GIF 图片。